X-E2 | Fujifilm Россия
- Матрица X-Trans™ CMOS II и процессор EXR II раскрывают весь потенциал любого объектива для обеспечения максимального качества фотографий.
- Самая быстрая в мире автоматическая фокусировка (0,08 секунды**) среди камер с сенсором размера APS-C и больше, ставшая возможной благодаря использованию уникальной системы автофокуса с фазовой детекцией Fujifilm.
- Классический дизайн повышает удобство ручного управления.
Самая быстрая в мире автоматическая фокусировка за 0,08 секунды** среди камер с сенсором размера APS-C и больше, ставшая возможной благодаря пикселям фазовой детекции, встроенным в улучшенную матрицу.
Быстрый отклик системы АФ и точная фокусировка в условиях плохого освещения возможны при сочетании метода фазовой детекции (со встроенными в матрицу датчиками фазовой детекции) и контрастного АФ — в FUJIFILM X-E2 используются обе технологии. Кроме того, гибридный автофокус автоматически переключается на оптимальную систему фокусировки в зависимости от типа сцены и условий съемки. Новый алгоритм повышает точность автофокуса при съемке малоконтрастных объектов или при плохом освещении. Эволюционировавшая система автофокуса FUJIFILM X-E2 осуществляет фокусировку на объекте настолько быстро, что вы никогда не упустите эти бесценные мгновенья.
Новый алгоритм повышает точность автофокуса при съемке малоконтрастных объектов или при плохом освещении. Эволюционировавшая система автофокуса FUJIFILM X-E2 осуществляет фокусировку на объекте настолько быстро, что вы никогда не упустите эти бесценные мгновенья.
Еще более красивая цветопередача и более высокая детализация снимков благодаря матрице APS-C X-Trans CMOS II.
Уникальная матрица Fujifilm X-Trans CMOS II улавливает свет от объектива с непревзойденным разрешением благодаря отсутствию оптического низкочастотного фильтра.
Технология оптимизации модуляции света раскрывает весь потенциал объективов XF.
Высокоточная обработка параметров фокусного расстояния и апертуры каждого устанавливаемого объектива и данных со всей площади кадра позволяет системе исправлять дифракционное смазывание при съемке с малым открытием диафрагмы и компенсировать небольшую размытость изображения на периферии объектива. В результате получается изображение высокого качества и удивительной контрастности, создающее ощущение пространственной реалистичности.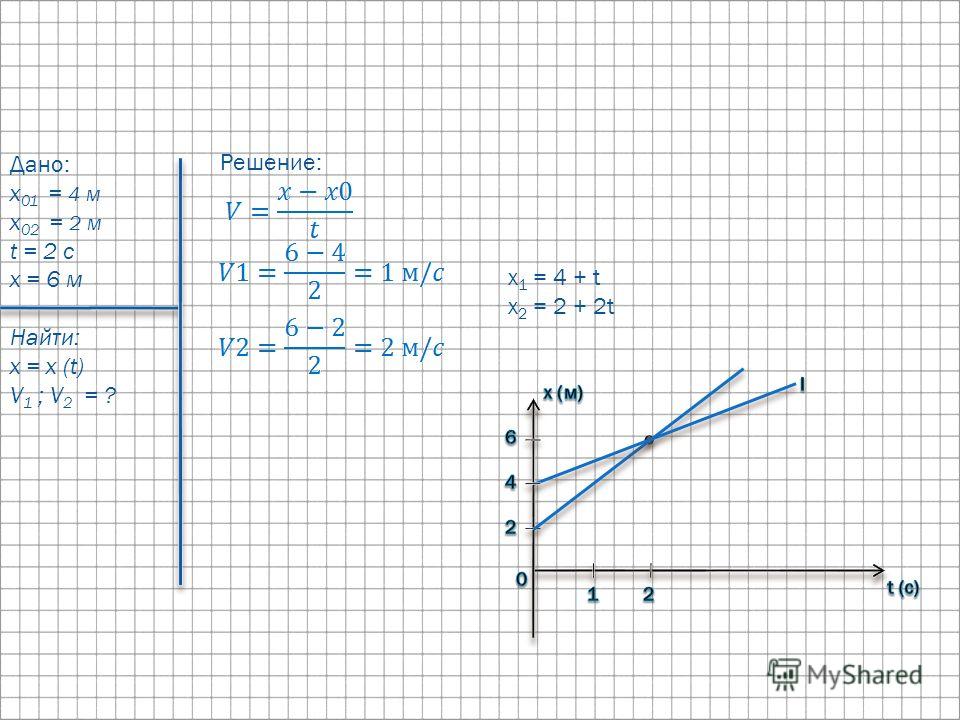
Еще больше радости от процесса фотографирования.
- Управление с помощью дисков
Оно настолько удобно, что камера становится как бы продолжением ваших глаз. - Кнопка Q
Обновленное меню съемки и настроек для максимального удобства. - Беспроводная передача фотографий «в одно касание»
Позволяет мгновенно отправить фотографии высокого качества на смартфон или компьютер. - Электронный видоискатель с разрешением прибл. 2,36 млн точек.
Естественный вид всей композиции с горизонтальным видимым полем обзора 25°.
Каждая новая модель в этой расширяющейся линейке представляет собой вершину оптической технологии.
Оригинальная технология Fujifilm X Mount была разработана с чистого листа. В результате был создан ряд высокоточных оптических решений, дополненных возможностями передовой цифровой технологии. От признанных объективов высокого разрешения серии XF до компактных портативных объективов серии ХС — каждый объектив раскрывает весь потенциал технологии X Mount.
Только одна камера может предложить вам все эти и многие другие возможности.
- Функция обнаружения лиц
- Сверхинтеллектуальная вспышка
- Простой в использовании непрерывный автофокус
- Диск компенсации экспозиции в диапазоне ±3,0 EV
* X-Trans является товарным знаком или зарегистрированным товарным знаком FUJIFILM Corporation
** Самая высокая скорость автофокусировки среди цифровых камер, оснащенных матрицей размером 4/3 дюйма и больше. По результатам исследований компании Fujifilm, проведенных в сентябре 2013 года в соответствии с требованиями стандарта CIPA с использованием камеры FUJIFILM X-E2 с объективом XF14 мм F2,8 R в режиме «High Performance».
Moto X (2 Gen) — полный обзор
В 2014 году, несмотря на то, что многие производители уперлись в какой-то порог технического прогресса, было довольно много смартфонов, которые стоило ожидать. Вспомнить хотя бы увеличившийся iPhone 6 или «убийцу флагманов» OnePlus One, да и многие другие тоже по праву можно упомянуть в данном контексте.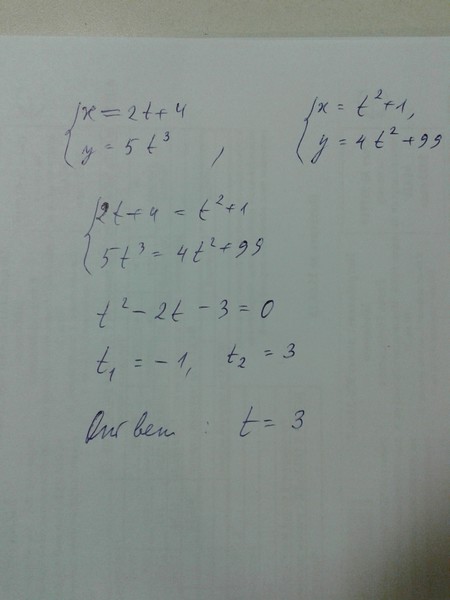 Но лично я ждал не их. Одним из самых ожидаемых смартфонов 2014 года для меня был Moto X (2014), и вот, после довольно длительного периода использования, я могу рассказать вам о нем подробно.
Но лично я ждал не их. Одним из самых ожидаемых смартфонов 2014 года для меня был Moto X (2014), и вот, после довольно длительного периода использования, я могу рассказать вам о нем подробно.
О моих первых впечатлениях от использования Moto X второго поколения вы можете прочитать тут. Также вы можете узнать о том, как новая модель сравнима со своим «младшеньким» прошлогодним братом. Сделать это можно пройдя по ссылке.
В данном же подробном обзоре я хотел бы в первую очередь поделиться своими впечатлениями от опыта использования аппарата, рассказать некоторые субъективные аспекты, которые я подметил. Но чтобы с чистой совестью сконцентрироваться на этом, давайте сначала пройдемся по формальностям.
Видеообзор
Технические характеристики
- Размеры: 140,8 х 72,4 х 10 мм.

- Вес: 144 г.
- Операционная система: Android 5.0 Lollipop.
- Процессор: четырехъядерный, 4 х 2,5 ГГц, Qualcomm Snapdragon 801
- Графика: Adreno 330
- Дисплей: AMOLED, 5,2″, 1920 × 1080, 424 ppi
- Память: 16/32 ГБ флеш.
- ОЗУ: 2 ГБ.
- Камера: основная — 13 МП, фронтальная — 2 МП.
- Беспроводные технологии: Wi-Fi, Bluetooth 4.1.
- Интерфейсные разъёмы: 3,5 мм jack, Micro USB 2.0.
- Аккумулятор: Li-Ion 2300 мАч.
Дизайн и эргономичность
Теперь перейдем именно к моим личным впечатлениям от устройства. Честно говоря, говорить об эргономичности Moto X я могу очень долго, потому что говорить действительно есть о чем. В новом поколении взяли то, что отлично получилось в первом, и улучшили почти в каждом аспекте. Рамка по периметру теперь металлическая, и она действительно добавляет того самого «премиального ощущения» при контакте с рукой.
Закругленная форма заставляет даже не задумываться о том, что максимальная толщина составлеят целых 10 мм, этого абсолютно не чувствуется. Как и в первом поколении, отдельного внимания стоит углубление с логотипом Motorola. Теперь оно больше, и выполнена деталь из отдельного куска алюминия. Мне такое исполнение нравится куда больше как внешне, так и тактильно. И хотя с увеличением размеров захватать пальцами камеру стало куда сложнее (банально не дотягивешься), а именно от этого защищало углубление, все равно фича очень крутая.
Как и в первом поколении, отдельного внимания стоит углубление с логотипом Motorola. Теперь оно больше, и выполнена деталь из отдельного куска алюминия. Мне такое исполнение нравится куда больше как внешне, так и тактильно. И хотя с увеличением размеров захватать пальцами камеру стало куда сложнее (банально не дотягивешься), а именно от этого защищало углубление, все равно фича очень крутая.
К слову, о размерах. По сравнению с предыдущим поколением, которое мне кажется четровски близким к идеальному, они выросли весьма существенно. Поначалу это сильно напрягало, но со временем я привык. Особенно после того, как попользовался шестидюймовым монстром. Все познается в сравнении, как известно. После некоторого времени я могу сказать, что пользоваться Moto X можно даже одной рукой с допустимой степенью комфорта. Но 5,2″ это что-то на грани моей зоны комфорта на данный момент, если не за нею.
В целом, инженерам Motorola удалось повторить небольшое «чудо» Moto X (2013): смартфон ощущается гораздо компактнее и приятнее, чем собратья с такой же диагональю.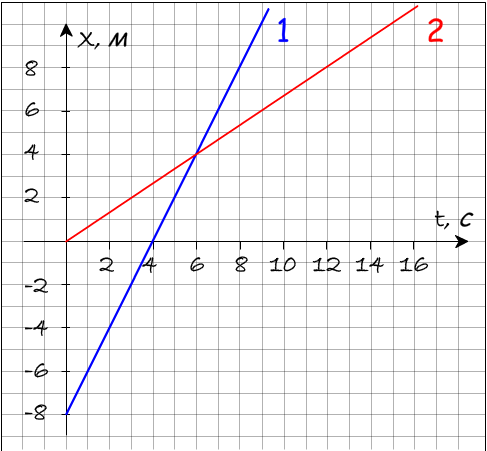 А, наверняка, другие материалы, такие как дерево или кожа, которые можно подобрать с помощью сервиса Motomaker или же достать в рознице, только усилят данное ощущение. Пластиковый же вариант (а именно такой был у меня на тесте) не впечатляет и очень активно собирает трудноочищаемые опечатки пальцев.
А, наверняка, другие материалы, такие как дерево или кожа, которые можно подобрать с помощью сервиса Motomaker или же достать в рознице, только усилят данное ощущение. Пластиковый же вариант (а именно такой был у меня на тесте) не впечатляет и очень активно собирает трудноочищаемые опечатки пальцев.
Стоит сказать, что по периметру расположились разъем microUSB на нижней грани, слот под симку и 3,5 мм jack на верхней, качелька регулировки громкости и кнопка включения/выключения. Последние выполнены из металла, а клавиша разблокировки имеет рифленую текстуру, что позволяет идентефицировать ее не глядя. Это очень удобно. Сами кнопки достаточно кликабельны, но в моем аппарате клавиша включения располагается как-то криво, что немного портит впечатление. Но вот высота их расположения и то, что обе сконцентрированы на одной грани — однозначный плюс.
Не забыли о юзабилити даже при создании элементов комплектации. Так, зарядное устройство имеет два выхода USB, что позволит заряжать сразу два гаджета от одной розетки.
Также внимания стоит и провод microUSB. На штекере он имеет несимметричную форму. Стоит взять его большим пальцем за выемку — и сразу становится понятно, каким концом его нужно вставлять, так что пока мы ждем массового распространения USB Type-C, вроде того, что будет идти в Nokia N1, решать проблему четырехмерных кабелей приходится так.
Дисплей
В новом Moto X установили 5,2″ дисплей с разрешением 1920 x 1080, что в простанародье также известно как FullHD, и дает более чем достаточную плотность пикселей в 424 ppi. Если отбросить вопросы удобства, то у большого экрана, конечно, есть ряд неоспоримых преимуществ. Впрочем, о них уже говорилось много раз, и еще раз все их перечислять нет смысла. Главное, что все они тут есть.
Как и в первом поколении Moto X, технология изготовления дисплея — AMOLED. Помимо глубококого черного и слегка перенасыщенных цветов, к которым быстро привыкаешь, это позволяет зажигать только нужные пиксели, не тратя батарею на подстветку всех остальных. Таким образом, например, реализована фишка под названием Moto Display, но о ней чуть позже.
Помимо глубококого черного и слегка перенасыщенных цветов, к которым быстро привыкаешь, это позволяет зажигать только нужные пиксели, не тратя батарею на подстветку всех остальных. Таким образом, например, реализована фишка под названием Moto Display, но о ней чуть позже.
Честно говоря, меня вполне устравивала плотность пикселей в первом поколении, в котором на 4,7″ разместили 720р, но, пожалуй, на 5,2″ FullHD является необходимостью, чтобы выглядеть действительно по-флагмански. К тому же уменьшилась воздушная прослойка, что положительно сказалось на качестве картинки.
На что хотелось бы пожаловаться, так это на яркость. Диапазон ее маловат с обеих сторон. При ярком освещении экран кажется тускловатым, а ночью может слегка выжигать сетчатку. К тому же автоматическая яркость явно занижена, что бывает довольно неприятно. Углы обзора зато чертовски близки к 180 градусам, что позволит, например, посмотреть ролик на YouTube всей компанией, положив смартфон на стол.
Звук
Как вы уже, наверное, знаете, хоть на передней панели и расположились две решетки — сверху и снизу от дисплея, динамик всего один. Вернее, основной динамик всего один, находится он под нижней решеткой. Сверху — только разговорный. Создается впечатление, что изначально их планировалось два (как, например, в Nexus 6), но в последний момент почему-то передумали.
Сам динамик очень громкий, но не очень качественный. Впрочем, как мне кажется, то время, когда слушать музыку с помощью внешнего динамика было модно, давно прошло. А для игрушек или ютуба качества вполне хватает. К тому же за счет высокого уровня громкости вы точно не пропустите звонок или уведомление. Главное, что направлен звук будет на пользователя, а не от него.
Благодаря решеткам, даже когда вы кладете Moto X дисплеем вниз, динамики не перекрываются, а еще слегка выпирающие элементы позволяют стеклу экрана лишний раз не соприкасаться с поверхностями, которые могут его поцарапать. Но есть у конструкции и минус. В эти самые решетки динамиков очень активно забивается пыль, а достать ее оттуда можно разве что балончиком со сжатым воздухом. Да и вполне вероятно, что краска с них со временем сотрется и рифленая поверхность будет деформирована, что слегка испортит товарный вид устройства.
Но есть у конструкции и минус. В эти самые решетки динамиков очень активно забивается пыль, а достать ее оттуда можно разве что балончиком со сжатым воздухом. Да и вполне вероятно, что краска с них со временем сотрется и рифленая поверхность будет деформирована, что слегка испортит товарный вид устройства.
В наушниках Moto X фактически ничем не выделяется среди конкурентов. Довольно необычным можно назвать тот факт, что в комплекте идут затычки, но, честно говоря, лучше бы их там не было. Кроме логотипа Motorola отметить в них абсолютно нечего, хотя, находятся же люди, которые ходят с Apple Earpods. А значит и эти могут кому-то, да пригодиться.
Камеры
В Moto X установили камеру с разрешением в 13 МП. По сравнению с прошлым поколением данный показатель увеличился на 3 пункта, но мы-то знаем, что это не всегда главное.
Скажу честно, я не являюсь большим ценителем мобильной фотографии, поэтому для меня качество картинки на выходе не является таким уж важным фактором. Сфотографировать документ так, чтобы его можно было прочитать, да запечатлеть смешной момент так, чтобы было понятно о чем речь, — мне этого вполне достаточно. Однако если вы захотите найти слабые места Moto X на фоне конкурентов, то камера, пожалуй, будет одной из них.
Сфотографировать документ так, чтобы его можно было прочитать, да запечатлеть смешной момент так, чтобы было понятно о чем речь, — мне этого вполне достаточно. Однако если вы захотите найти слабые места Moto X на фоне конкурентов, то камера, пожалуй, будет одной из них.
Тем не менее, если сравнивать с предыдущим поколением не только напрямую, но и в контексте современников, отставание Moto X 2014 года от признанных лидеров в данном направлении гораздо меньше, чем у поколения 2013 года.
Интересный момент — сдвоенная вспышка. В данном случае речь не идет о двух диодах с разной температурой цвета (как Сами-Знаете-Где), но есть круговой рассеиватель. По задумке он должен делать мягкий равномерный свет, но на деле это скорее дизайнерский элемент. В конце концов, встроенная вспышка — это такая штука, основное предназначение которой все же является фонариком. А с этой задачей Moto X справляется на «отлично».
Фронтальная камера находится справа от сетки разговорного динамика и выдает достаточно хорошую картинку. Но при этом Motorola решила не гнаться за модой, оснастив Moto X модулем всего на 2 МП, так что современные селфифоны вроде HTC Desire Eye будут разрывать по качеству себяшек. Впрочем, существенную разницу в каком-нибудь инстаграме после всех фильтров и прочей мишуры земетят только истинные ценители.
Но при этом Motorola решила не гнаться за модой, оснастив Moto X модулем всего на 2 МП, так что современные селфифоны вроде HTC Desire Eye будут разрывать по качеству себяшек. Впрочем, существенную разницу в каком-нибудь инстаграме после всех фильтров и прочей мишуры земетят только истинные ценители.
Примеры фото:
В плане приложения камеры разработчики остались верны своим традициям, сделав все максимально просто. Съемка осуществляется тапом по любому месту на экране, а настройки вызываются свайпом слева направо. Точку фокуса можно выставлять отдельно, что бывает довольно полезно. Естественно, до ручных настроек, которые можно найти, например, в Люмиях, тут далеко, но никто и не претендует на звание камерофона. Вместе с жестом быстрого запуска, о котором чуть позже, Moto X умеет делать то, что и должен делать смартфон: быстро вылезти из кармана и запечатлеть происходящее. Для высокого же искусства придется, наверное, поискать что-то другое.
Видео может сниматься в разрешении вплоть до 4К. Примеры можно видеть ниже.
Примеры можно видеть ниже.
ПО
Буквально за день до написания данного обзора мне прилетело OTA обновление до версии 5.0 Lollipop. И это с учетом того, что у меня на тесте была версия с кодовым номером XT1092, что означает, что предназначена она для европейского рынка. В свою очередь XT1095, также известная как Pure Edition, «лоллипопку» смогла лизнуть даже раньше, чем Nexus 5, который вроде как дожен был быть лидером по этому показателю. Учитывая близость Moto X и Nexus 6, на быстрые обновления можно будет рассчитывать и при следующем апдейде ОС.
В качестве лаунчера предустановлен «Google Старт», такой же, как и в нексусах, что наверняка играет не последнюю роль в быстрых обновлениях. На крайнем левом рабочем столе находится обновленный Google Now, и вообще все теперь супер-пупер Material Design, как я люблю.
Для многих важным моментом будет и то, что теперь в Moto X есть полноценная поддержка русского языка на системном уровне. Ранее это являлось существенным порогом, не позволяющим пользоваться устройством, ведь надо либо шить ядро, либо учить язык. А есть целый ряд людей, которые не умеют делать ни того, ни другого и даже не хотят пробовать. Хоть это не так и сложно как кажется. Особенно учить язык.
Изменения, которые разработчики Motorola внесли в операционную систему, минимальны, но очень значительны. Во многом за счет софтовых фишек всем так полюбился Moto X первого поколения. И то, что хорошо работало, решили не портить.
Фишки
Если раньше мото-фишки были разрознены, то теперь их объединили в одно приложение под названием «Moto». В него входят четыре основных элемента: Assist, Actions, Voice, Display. О них стоит узнать поподробнее.
Moto Assist
Данный раздел имеет четыре подпункта: «Сон», «Встреча», «За рулем» и «Дома». В каждом из них предусматриватеся свой режим работы. В «Сне» можно задать часы, в которые вы не хотите, чтобы телефон вас беспокоил, и задать критерии, при которых звук все же должен пропускаться и будить вас. Например, кто-то звонит дважды.
В каждом из них предусматриватеся свой режим работы. В «Сне» можно задать часы, в которые вы не хотите, чтобы телефон вас беспокоил, и задать критерии, при которых звук все же должен пропускаться и будить вас. Например, кто-то звонит дважды.
Во время встреч, которые подтягиваются автоматически из вашего Google-календаря, также можно устанавливать беззучный режим или даже автоответ смс-кой.
В режиме «За рулем», который также активируется, когда вы начинаетесь перемещаться с соответствующей скоростью, телефон будет читать вслух сообщения и называть звонящего, чтобы вы не отвлекались от дороги, а также автоматически можно настроить воспроизведение музыки через Bluetooth или проводное соединение.
Домашний режим напоминает дорожный, в нем также Moto X будет рассказывать вам обо всех событиях вслух. Разница в том, что активируется он по локации, а не скорости перемещения.
Moto Voice
Продолжая традиции голосового управления, взятые из первого поколения, Moto X 2014 умеет распознавать ваш голос и запускать голосового ассистента даже из заблокированного состояния. Теперь фраза, по которой триггерится все это дело, может быть такой, какой того захотите вы, не ограничивая вас «Ok, Google Now», как раньше. Вы можете запрограммировать как «Ok, Moto X», так и «Hey, Jarvis», или что угодно другое, на что фантазии хватит.
Теперь фраза, по которой триггерится все это дело, может быть такой, какой того захотите вы, не ограничивая вас «Ok, Google Now», как раньше. Вы можете запрограммировать как «Ok, Moto X», так и «Hey, Jarvis», или что угодно другое, на что фантазии хватит.
Стоит отметить, что работать Moto Voice будет только в том случае, если системным языком выбран английский. С русской локализацией придется ограничиться стандартным для остальных смартфонов «Ok, Google». И работать это будет только при включенном дисплее.
Moto Display
Данная фишка является, пожалуй, моей самой любимой и часто используемой. Смысл ее в том, что в выключенном состоянии на заблокированный экран выводятся часы и текущие уведомления, посмотреть содержание которых можно одним касанием. В отличие от предыдущей итерации, теперь их можно открыть сразу три, а не только одно последнее.
Кроме того, что таким образом удобно видеть последние события, это очень удобный способ разблокировки экрана. Честно говоря, я не помню, когда последний раз пользовался клавишей включения/выключения для этих целей.
Честно говоря, я не помню, когда последний раз пользовался клавишей включения/выключения для этих целей.
Moto Actions
Также как и Moto Display, это очень полезная и нужная фича. Как и ранее, вы можете запускать камеру, два раза провернув запястием. Это очень удобно и быстро. Так, например, у меня уже давно нет иконки запуска камеры на рабочем столе.
Кроме этого в Moto X есть четыре низкомощных инфракрасных датчика, которые скинируют приблежения. Расположены они по углам экрана и в черной версии абслолютно незаметны. Зато с их помощью вы можете взмахнуть рукой над экраном, чтобы включить Moto Display, отложить сигнал будильника (это зло в чистом виде, так можно очень легко проспать, между прочим) или же выключить громкость во время звонка.
Attentive Display
Также в Moto X есть интересная функция, которая также использует инфракрасные датчики, но не входит в конгломерацию приложений Moto. Найти ее можно в разделе настроек дисплея. С помощью сенсоров смартфон может определить, есть ли ваше лицо перед ним, и если оно присутствует, то экран не будет гаснуть. Нечто подобное мы уже могли видеть в исполнении Samsung, когда для этого использовали фронтальную камеру и следили за глазами.
Нечто подобное мы уже могли видеть в исполнении Samsung, когда для этого использовали фронтальную камеру и следили за глазами.
Motomaker
По-прежнему уникальной фишкой является возможность кастомизировать внешний вид смартфона — от материалов корпуса до собственной гравировки. К различным цветным задним панелькам из пластика или пород дерева и даже бамбука добавились варианты из настоящей кожи. Самым интересным, как по мне, является вариант из «футбольной кожи», которая аналогична поверхности мяча для американского футбола. Правда, последний вариант является эксклюзивом для оператора Verizon.
Сделать заказ с помощью сервиса Motomaker пока что можно только в США. Важным моментом является то, что если вы захотите-таки заказать себе собственный вариант, будьте готовы к трудностям с покупкой. Motorola крайне неохотно принимает заказы от лиц, не явлюящихся резидентами США. В отличие от какого-нибудь Амазона, который, правда, торгует уже готовыми вариантами внешнего вида.
Железо и производительность
Если модель 2013 года была построена на базе чипа Qualcomm Snapdragon S4 Pro, который уже на момент выпуска был довольно устаревшим, в этот раз подобного не произошло. Новый Moto X вышел на рынок с почти топовым четырехъядерным Snapdragon 801, работающим на частоте 2,5 ГГц в паре с видеоускорителем Adreno 330. Никуда не делась и хваленая оптимизация, за счет которой первый Moto X до сих пор работает на уровне с флагманами. Так что второе поколение смело можно называть одним из быстрейших Android-смартфонов на данным момент.
Не было ни одного приложения, которое бы заставило смартфон тормозить. Не скажу, что лагов и прочих неприятностей за все время использования не было совсем, но подобное встечается абсолютно на всех телефонах, что бы там кто ни говорил. А с приходом Лоллипопа все стало работать еще быстрее, чем было раньше.
Автономность
Второе слабое место, к которому смело можно придраться, помимо камеры — автономность. Разработчики установили аккумулятор со скромной по нынешним меркам емкостью 2300 мАч, что не лучшим образом сказалось на продолжительности жизни от одного заряда.
Разработчики установили аккумулятор со скромной по нынешним меркам емкостью 2300 мАч, что не лучшим образом сказалось на продолжительности жизни от одного заряда.
В моем режиме использования Moto X доживал до конца довольно активного дня с остатком примерно 20-25%, что неплохо, но и не хорошо. Это соответствовало где-то 4,5 часам активного экрана. Если обозначить точку отсчета, то по ощущениям Moto X 2014 живет чуть дольше, чем Moto X 2013 или Nexus 5. Так что ситуацию, при которой смартфон бы попросился к розетке, не дожив до конца рабочего дня, вполне реально.
Но есть и положительные стороны. Например, поддерживается технология от Qualcomm под названием Quick Charge 2.0. С помощью фирменного аксессуара под названием Turbo Charger, который продается отдельно за $35 (или, например, идет в комплекте с Droid Turbo) можно очень быстро зарядить сматфон. Так, за 15 минут Moto X смог пополнить свои внутренние резервы с 3 до 31%, что очень хорошо. Так что с дополнительным аксессуаром вы сможете заряжаться оперативно даже в середине дня. Единственный минус в том, что сам Турбочарджер довольно габаритный и требует переходника на наши розетки. Ну, и, естественно, его нужно будет докупить отдельно. А в нашей рознице найти его очень непросто.
Единственный минус в том, что сам Турбочарджер довольно габаритный и требует переходника на наши розетки. Ну, и, естественно, его нужно будет докупить отдельно. А в нашей рознице найти его очень непросто.
Выводы
В целом Moto X оставил у меня самые положительные впечатления. Он очень хорошо лежит в руке за счет удачной формы корпуса, металлическая рамка приятно холодит руку, выглядит он очень стильно. Быстрые обновления и правильная отптимизация позволяют быть уверенным, что работать смартфон будет отлично, а фактически «голый» Android становится все более и более привлекательным по сравнению с тачвизами и сенсами. Да и железа должно хватить надолго, ведь оно здесь действительно флагманское.
Экран увеличил габариты, но по своему опыту скажу, что к этому можно привыкнуть, а пользоваться устройством одной рукой по-пержнему возможно, хоть и придется немного помучаться. Разрешения FullHD же более чем достаточно для 5,2″, все выглядит действительно круто, особенно если вам, как и мне, нравится AMOLED.
Как и раньше, отдельного внимания стоят все фишки, которые вроде как и незаметны, но очень существенны в ежедневном использовании. Сам не замечаешь, как плотно к ним привыкаешь, и затем не можешь без них пользоваться остальными смартфонами.
Безусловно, есть и относительно слабые места. К ним стоит отнести емкость аккумулятора и качество камеры. Если для вас данные вещи критичны, то стоит подумать дважды, прежде чем брать Moto X (2 Gen.).
Я могу смело сказать, что разработчикам удалось сохранить главное из того, что присутствовало в первом поколении. Есть в Moto X некий неуловимый дзен (и ASUS тут совсем не при чем). Его очень сложно передать словами, фотографиями или даже видео, но, как показывает практика, достаточно взять аппарат в руки, как понимаешь, что именно имеется в виду. Смартфону удалось остаться в реальности гораздо лучше, чем на бумаге, а это удается очень немногим.
Многих может напугать процесс заказа из США, ведь надо связываться с посредниками, долго ждать и вообще, там куча рисков и других вещей, которые могут отпугнуть. Заморочиться с этим стоит разве что в том случае, если вы твердо намерены заказать какой-то экзотический вариант. А так найти как обычные пластиковые, так и деревянные и даже кожанные опции довольно просто. Узнать подробнее можно по ссылке под этим обзором.
Заморочиться с этим стоит разве что в том случае, если вы твердо намерены заказать какой-то экзотический вариант. А так найти как обычные пластиковые, так и деревянные и даже кожанные опции довольно просто. Узнать подробнее можно по ссылке под этим обзором.
Процессор Intel® Pentium® E2180 (1 МБ кэш-памяти, тактовая частота 2,00 ГГц, частота системной шины 800 МГц) Спецификации продукции
Дата выпуска
Дата выпуска продукта.
Литография
Литография указывает на полупроводниковую технологию, используемую для производства интегрированных наборов микросхем и отчет показывается в нанометре (нм), что указывает на размер функций, встроенных в полупроводник.
Количество ядер
Количество ядер — это термин аппаратного обеспечения, описывающий число независимых центральных модулей обработки в одном вычислительном компоненте (кристалл).
Базовая тактовая частота процессора
Базовая частота процессора — это скорость открытия/закрытия транзисторов процессора. Базовая частота процессора является рабочей точкой, где задается расчетная мощность (TDP). Частота измеряется в гигагерцах (ГГц) или миллиардах вычислительных циклов в секунду.
Кэш-память
Кэш-память процессора — это область быстродействующей памяти, расположенная в процессоре. Интеллектуальная кэш-память Intel® Smart Cache указывает на архитектуру, которая позволяет всем ядрам совместно динамически использовать доступ к кэшу последнего уровня.
Частота системной шины
Шина — это подсистема, передающая данные между компонентами компьютера или между компьютерами. В качестве примера можно назвать системную шину (FSB), по которой происходит обмен данными между процессором и блоком контроллеров памяти; интерфейс DMI, который представляет собой соединение «точка-точка» между встроенным контроллером памяти Intel и блоком контроллеров ввода/вывода Intel на системной плате; и интерфейс Quick Path Interconnect (QPI), соединяющий процессор и интегрированный контроллер памяти.
В качестве примера можно назвать системную шину (FSB), по которой происходит обмен данными между процессором и блоком контроллеров памяти; интерфейс DMI, который представляет собой соединение «точка-точка» между встроенным контроллером памяти Intel и блоком контроллеров ввода/вывода Intel на системной плате; и интерфейс Quick Path Interconnect (QPI), соединяющий процессор и интегрированный контроллер памяти.
Четность системной шины
Четность системной шины обеспечивает возможность проверки ошибок в данных, отправленных в FSB (системная шина).
Расчетная мощность
Расчетная тепловая мощность (TDP) указывает на среднее значение производительности в ваттах, когда мощность процессора рассеивается (при работе с базовой частотой, когда все ядра задействованы) в условиях сложной нагрузки, определенной Intel. Ознакомьтесь с требованиями к системам терморегуляции, представленными в техническом описании.
Ознакомьтесь с требованиями к системам терморегуляции, представленными в техническом описании.
Диапазон напряжения VID
Диапазон напряжения VID является индикатором значений минимального и максимального напряжения, на которых процессор должен работать. Процессор обеспечивает взаимодействие VID с VRM (Voltage Regulator Module), что, в свою очередь обеспечивает, правильный уровень напряжения для процессора.
Доступные варианты для встраиваемых систем
Доступные варианты для встраиваемых систем указывают на продукты, обеспечивающие продленную возможность приобретения для интеллектуальных систем и встроенных решений. Спецификация продукции и условия использования представлены в отчете Production Release Qualification (PRQ). Обратитесь к представителю Intel для получения подробной информации.
Обратитесь к представителю Intel для получения подробной информации.
Поиск продукции с Доступные варианты для встраиваемых систем
Поддерживаемые разъемы
Разъемом называется компонент, которые обеспечивает механические и электрические соединения между процессором и материнской платой.
T
CASEКритическая температура — это максимальная температура, допустимая в интегрированном теплораспределителе (IHS) процессора.
Технология Intel® Turbo Boost
‡Технология Intel® Turbo Boost динамически увеличивает частоту процессора до необходимого уровня, используя разницу между номинальным и максимальным значениями параметров температуры и энергопотребления, что позволяет увеличить эффективность энергопотребления или при необходимости «разогнать» процессор.
Технология Intel® Hyper-Threading
‡Intel® Hyper-Threading Technology (Intel® HT Technology) обеспечивает два потока обработки для каждого физического ядра. Многопоточные приложения могут выполнять больше задач параллельно, что значительно ускоряет выполнение работы.
Поиск продукции с Технология Intel® Hyper-Threading ‡
Технология виртуализации Intel® (VT-x)
‡Технология Intel® Virtualization для направленного ввода/вывода (VT-x) позволяет одной аппаратной платформе функционировать в качестве нескольких «виртуальных» платформ. Технология улучшает возможности управления, снижая время простоев и поддерживая продуктивность работы за счет выделения отдельных разделов для вычислительных операций.
Технология улучшает возможности управления, снижая время простоев и поддерживая продуктивность работы за счет выделения отдельных разделов для вычислительных операций.
Поиск продукции с Технология виртуализации Intel® (VT-x) ‡
Технология виртуализации Intel® для направленного ввода/вывода (VT-d)
‡Технология Intel® Virtualization Technology для направленного ввода/вывода дополняет поддержку виртуализации в процессорах на базе архитектуры IA-32 (VT-x) и в процессорах Itanium® (VT-i) функциями виртуализации устройств ввода/вывода. Технология Intel® Virtualization для направленного ввода/вывода помогает пользователям увеличить безопасность и надежность систем, а также повысить производительность устройств ввода/вывода в виртуальных средах.
Поиск продукции с Технология виртуализации Intel® для направленного ввода/вывода (VT-d) ‡
Архитектура Intel® 64
‡Архитектура Intel® 64 в сочетании с соответствующим программным обеспечением поддерживает работу 64-разрядных приложений на серверах, рабочих станциях, настольных ПК и ноутбуках.¹ Архитектура Intel® 64 обеспечивает повышение производительности, за счет чего вычислительные системы могут использовать более 4 ГБ виртуальной и физической памяти.
Поиск продукции с Архитектура Intel® 64 ‡
Набор команд
Набор команд содержит базовые команды и инструкции, которые микропроцессор понимает и может выполнять. Показанное значение указывает, с каким набором команд Intel совместим данный процессор.
Показанное значение указывает, с каким набором команд Intel совместим данный процессор.
Состояния простоя
Режим состояния простоя (или C-состояния) используется для энергосбережения, когда процессор бездействует. C0 означает рабочее состояние, то есть ЦПУ в данный момент выполняет полезную работу. C1 — это первое состояние бездействия, С2 — второе состояние бездействия и т.д. Чем выше численный показатель С-состояния, тем больше действий по энергосбережению выполняет программа.
Enhanced Intel SpeedStep® Technology (Усовершенствованная технология Intel SpeedStep®)
Усовершенствованная технология Intel SpeedStep® позволяет обеспечить высокую производительность, а также соответствие требованиям мобильных систем к энергосбережению. Стандартная технология Intel SpeedStep® позволяет переключать уровень напряжения и частоты в зависимости от нагрузки на процессор. Усовершенствованная технология Intel SpeedStep® построена на той же архитектуре и использует такие стратегии разработки, как разделение изменений напряжения и частоты, а также распределение и восстановление тактового сигнала.
Стандартная технология Intel SpeedStep® позволяет переключать уровень напряжения и частоты в зависимости от нагрузки на процессор. Усовершенствованная технология Intel SpeedStep® построена на той же архитектуре и использует такие стратегии разработки, как разделение изменений напряжения и частоты, а также распределение и восстановление тактового сигнала.
Технология Intel® Demand Based Switching
Intel® Demand Based Switching — это технология управления питанием, в которой прикладное напряжение и тактовая частота микропроцессора удерживаются на минимальном необходимом уровне, пока не потребуется увеличение вычислительной мощности. Эта технология была представлена на серверном рынке под названием Intel SpeedStep®.
Поиск продукции с Технология Intel® Demand Based Switching
Технологии термоконтроля
Технологии термоконтроля защищают корпус процессора и систему от сбоя в результате перегрева с помощью нескольких функций управления температурным режимом. Внутрикристаллический цифровой термодатчик температуры (Digital Thermal Sensor — DTS) определяет температуру ядра, а функции управления температурным режимом при необходимости снижают энергопотребление корпусом процессора, тем самым уменьшая температуру, для обеспечения работы в пределах нормальных эксплуатационных характеристик.
Внутрикристаллический цифровой термодатчик температуры (Digital Thermal Sensor — DTS) определяет температуру ядра, а функции управления температурным режимом при необходимости снижают энергопотребление корпусом процессора, тем самым уменьшая температуру, для обеспечения работы в пределах нормальных эксплуатационных характеристик.
Новые команды Intel® AES
Команды Intel® AES-NI (Intel® AES New Instructions) представляют собой набор команд, позволяющий быстро и безопасно обеспечить шифрование и расшифровку данных. Команды AES-NI могут применяться для решения широкого спектра криптографических задач, например, в приложениях, обеспечивающих групповое шифрование, расшифровку, аутентификацию, генерацию случайных чисел и аутентифицированное шифрование.
Поиск продукции с Новые команды Intel® AES
Технология Intel® Trusted Execution
‡Технология Intel® Trusted Execution расширяет возможности безопасного исполнения команд посредством аппаратного расширения возможностей процессоров и наборов микросхем Intel®. Эта технология обеспечивает для платформ цифрового офиса такие функции защиты, как измеряемый запуск приложений и защищенное выполнение команд. Это достигается за счет создания среды, где приложения выполняются изолированно от других приложений системы.
Эта технология обеспечивает для платформ цифрового офиса такие функции защиты, как измеряемый запуск приложений и защищенное выполнение команд. Это достигается за счет создания среды, где приложения выполняются изолированно от других приложений системы.
Поиск продукции с Технология Intel® Trusted Execution ‡
Функция Бит отмены выполнения
‡Бит отмены выполнения — это аппаратная функция безопасности, которая позволяет уменьшить уязвимость к вирусам и вредоносному коду, а также предотвратить выполнение вредоносного ПО и его распространение на сервере или в сети.
больше чем Godox X1t, но меньше чем Godox Xpro / Цифровое фото и аксессуары для съёмки / iXBT Live
Обзор радиосинхронизатора Godox X2T (трансмиттера) который также пригодится тем, кто ищет для трансмиттера Godox X2T инструкцию на русском или руководство пользователя.
Вступление
До недавнего времени выбор радиосихронизаторов (трансмиттеров) от Godox был небольшой. Было всего два варианта: либо «маленький» Godox X1T, выпущенный ещё в 2015 году, где было не очень удобное управление и маленький экранчик, либо «большой» Godox Xpro, где управление было гораздо более эргономичным и имелся достаточно большой экран, отображающий сразу все параметры.
Лично я уже несколько лет пользуюсь трансмиттером Godox X1t, т.к. в отличии от Godox Xpro он гораздо более компактный, а ситуации, когда бы мне потребовалось моментальное и значительное изменение параметров работы групп ведомых вспышек встречаются в несколько раз реже чем вероятность зацепить установленную на камеру фотовспышку или больший синхронизатор, например такой как Godox XPro или YN560TX.
А в феврале этого года на выставке WPPI Godox анонсировали новую модель синхронизатора, а именно Godox X2T. А более подробная информация появилась только в мае. В анонсе упоминались:
- измененный интерфейс на графическом дисплее
- пять кнопок прямого выбора группы (A/B/C/D/E)
- кнопка выбора «все группы»
- встроенный Bluetooth для управления со смартфона
- подсветка кнопок
- блокировка кнопок управления
- USB TypeC порт для обновления прошивки
- функция сканирования каналов для поиска наименее загруженного
- регулировка мощности с шагом от 0. 1EV
- установки моделирующего света и звукового сигнала сразу на всю выбранную группу вспышек
- графическое меню
 1EV
1EVПрочитав анонс, я с нетерпением ожидал выхода обновленной модели трансмиттера Godox X2T и старался заполучить их себе для обзора. И мне удалось, я получил синхронизаторы Godox X2T-C для Canon и Godox X2T-N для Nikon. И на момент написания этого обзора уже доступна к заказу также версия трансмиттера Godox X2T-S для Sony и ожидаются Godox X2T-F для Fuji, Godox X2T-O для Olympus / Panasonic и Godox X2T-P для Pentax.
Ну что же, давайте посмотрим на Godox X2T и сравним его с его предшественником, Godox X1T. Начну я с характеристик.
Характеристики Godox X2t:
- Совместимость: E-TTL (X2T-C Canon), iTTL (X2T-N Nikon), TTL (X2T-S Sony), TTL (X2T-F Fujifilm), TTL (X2T-O Olympus / Panasonic), TTL (X2T-P Pentax), любыми камерами через PCSync.
- TTL: да
- Ручное управление мощностью (M): да
- Поддержка одновременной работы нескольких синхронизаторов: да
- Высокоскоростная синхронизация (HSS/FP): да
- Работа по второй шторке: да
- Компенсация экспозиции (FEC): -3. ..+3EV с шагом 1/3EV
- Блокировка экспозиции вспышки (FEL): да
- Подсветка автофокуса: да
- Память настроек: да
- Обновление прошивки: да
- Управление зумом ведомых вспышек: да, в ручном или автоматическом режиме
- Дистанция работы: 0-100 метров
- Рабочая частота: 2,4ГГц
- Каналы: 32
- Поддержка wireless ID: да, 01-99
- Групп: пять (A/B/C/D/E)
- Дисплей: матричный ЖК экран с подсветкой
- Питание: 2 АА
- Размеры: 72х70ч58мм
- Вес: 90г
 ..+3EV с шагом 1/3EV
..+3EV с шагом 1/3EVКомплектация и внешний вид
В темных тонах оформленные коробки, и только в уголке есть упоминание под какую систему трансмиттер упакован в ту или иную коробку.
С обратной стороны наглядно показаны возможности радиосинхронизатора, но лучше я покажу вам картинку с сайта производителя:
Больше на коробке ничего интересного нет.
ну разве что пиктограмок немного) Ведь самое интересное, оно, конечно же, внутри коробки.
Инструкция на английском и китайском языках (инструкции на русском на трансмиттер Godox X2T на текущий момент нет, и вряд ли она появится), гарантийный талон, картонка QCPass и неизменный спутник новой электроники, пакетик силикагеля.
И вот они, долгожданные трансмиттеры Godox X2T-C для Canon и Godox X2T-N для Nikon. Но между собой их сравнивать совершенно не интересно, ведь отличаются они, ну кроме, конечно, буквы в наименовании модели, лишь дополнительными контактами горячего башмака. И поэтому предлагаю сравнить их с Godox X1T-N:
Как видно, кнопка test переехала с правой на левую сторону, добавились подсвеченные кнопки выбора групп и появился значок Bluetooth.
С левой стороны изменения лишь косметические: иные выключатели питания и подсветки автофокуса.
А вот справой стороны, увы, разъемы синхронизации и USB лишись резиновой заглушки. Жаль.
С передней стороны все также, за красным окошком установлен светодиод подсветки автофокуса.
X2T стал несколько выше по сравнению с X1T, в основном за счет того, что теперь синхронизатор фиксируется в горячем башмаке не шайбой, а быстрым фиксатором.
Ещё из изменений, более значительных: трансмиттер теперь смещен в левую сторону от горячего башмака и он теперь не перекрывает верхний ЖК-экран камеры; так же на левую сторону перенесены подсвеченные кнопки и колёсико; увеличенный экран стал графическим и гораздо более информативным. И получил более яркую подсветку. Появился даже индикатор уровня заряда батареи.
И получил более яркую подсветку. Появился даже индикатор уровня заряда батареи.
Кстати, кнопки слева от жк-экрана имеют двойные функции:
- Mode — выбор режима TTL/M/— для выбранной группы или групп фотовспышек, а при длительном удержании — блокировка управления. Полезно если не хотите случайно сбить выставленные настройки.
- Menu — вход у меню пользовательских настроек. При длительном удержании включение или отключение моделирующего света.
- Set — установка/выбор. При удержании активируются все группы фотовспышек, работающие в режиме М.
Пользовательские функции
Меню пользовательских функций теперь включает в себя большее количество параметров, кратенько пробегусь по ним:
- Sync — включение высокоскоростной синхронизации (HSS/FP) или режима «по задней шторке» (Rear / Second-curtain sync)
- BLUE.T. — включение Bluetooth
- BEER — включение звукового подтверждения
- ZOOM — управление положением зума ведомых вспышек (AUTO/24-200)
- SCAN — сканирование диапазона для поиска наиболее подходящих каналов. Сканирование занимает примерно пол минуты и после отображает каналы с наименьшим количеством помех и минимальной интерференцией .
 Сканирование занимает примерно пол минуты и после отображает каналы с наименьшим количеством помех и минимальной интерференцией .
Сканирование занимает примерно пол минуты и после отображает каналы с наименьшим количеством помех и минимальной интерференцией .- CH — выбор канала (01-32)
- ID — фотовспышки Godox с последними версиями прошивок кроме номера канала также могут использовать ID передатчика (01-99) для опознавания «свой-чужой», что позволяет нескольким фотографам работать одновременно на одном канале не мешая друг другу.
- PC SYNC — режим работы разъема синхронизации, на вход или на выход, для использования через кабель с камерами без горящего башмака, флешметрами, другими синхронизаторами и иными устройствами запуска.
- DELAY — задержка срабатывания ведомых фотовспышек в режиме высокоскоростной синхронизации (FP/HSS), до 9,9мсек с шагом 0,1
- SHOOT — Очень интересный параметр, остановлюсь на нем подробнее.
Суть его в том, что по умолчанию, синхронизаторы отправляют параметры на ведомые фотовспышки лишь при изменении оных, а при съемке для групп вспышек, работающих в режимах М или Multi отправляется только сигнал триггера, что позволяет немного экономить заряд батареек. Это подходит для того случая, когда снимает один фотограф (один человечек, по умолчанию).
Это подходит для того случая, когда снимает один фотограф (один человечек, по умолчанию).
Если же необходимо чтобы несколько фотографов одновременно работали с одними и теме же фотовспышками, то следует выбирать режим «несколько фотографов» (три человечка), в этом случае трансмиттер будет отправлять ведомым фотовспышкам параметры каждый раз при съемке кадра. Конечно, в этом режиме потребление будет несколько больше.
Кстати, этот же режим будет удобен и в том случае, если вы будет снимать двумя камерами, с двумя синхронизаторами, на них. Это позволит не отвлекаться на включение-выключение синхронизаторов на камерах.
При выборе APP синхронизатор будет отправлять лишь сигнал для срабатывания, а контроль параметров работы ведомых фотовспышек будет осуществляться только с приложения со смартфона.
- DIST — выбор дистанции работы 1-100 метров или 0-30. Такой же выбор есть в трансмиттере Godox Xpro, а вот на Godox X1T такого выбора нет, и многие жаловались на то, что ведомая вспышка не срабатывает в тех случаях когда она расположена рядом с синхронизатором. Впрочем, в инструкции (да только кто же их читает) к синхронизатору Godox X1T написано что для переключения в режим 0-30 надо зажать кнопку тест и включить синхронизатор. Синхронизатор должен дважды моргнуть светодиодом status, сигнализируя о переходе в режим 0-30 метров.
 Впрочем, в инструкции (да только кто же их читает) к синхронизатору Godox X1T написано что для переключения в режим 0-30 надо зажать кнопку тест и включить синхронизатор. Синхронизатор должен дважды моргнуть светодиодом status, сигнализируя о переходе в режим 0-30 метров.
Впрочем, в инструкции (да только кто же их читает) к синхронизатору Godox X1T написано что для переключения в режим 0-30 надо зажать кнопку тест и включить синхронизатор. Синхронизатор должен дважды моргнуть светодиодом status, сигнализируя о переходе в режим 0-30 метров.- STEP — диапазон и шаг управления мощностью, доступны такие варианты: 1/128(0.3), 1/256(0.3), 1/128(0.1), 1/256(0.1), 3.0(0.1), 2.0(0.1). Конечно, регулировать мощность с шагом 0.1EV это конечно круто, но на практике такая точность редко когда требуется. Но то, что такая возможность имеется это хорошо. Лучше пусть будут избыточные хотя и неиспользуемые возможности, чем наоборот.
- GROUP — переключение между работой с тремя (A-C) или пять группами (A-E).
- STBY — установка времени ухода синхронизатора в режим пониженного энергопотребления (сон) при неиспользовании.
- LIGHT — Управлением временем работы подсветки экрана и кнопок.
- LCD — установка контраста ЖК-экрана от -3 до 3. На мой взгляд изменения слабо заметны.
Управление со смартфона через Bluetooth трансмиттером Godox X2T
Находим в GooglePlay (версия для IOS также есть), устаналиваем, запускаем, заходим в Bluetooth,
Ищем, подключаемся (кто не читал инструкцию Godox X2t пароль по умолчанию 000000), пользуемся.
есть возможность выбора канала, импорта и экспорта настроек, и режим Multi (стробоскопа)
Ниже групп расположена кнопка добавления (активации) дополнительных групп фотовспышек, а если кликнуть на любую группу, то можно настроить индивидуальные параметры для группы, такие как мощность или экспозиционную поправку, мощность моделирующего света, режим работы и минимальную мощность.
В общем, возможность управлять фотовспышками Godox со смартфона есть, но т.к. я не вижу у себя потребности в этом функционале, я поклацал, попробовал, поулыбался, сделал скриншоты и на этом оставил. Дело в том, что мне не понравилось как организована коррекция мощности вспышек: если на вспышках или трансмиттере колесико (jog dial) позволяет сразу значительно скорректировать мощность, то в приложении один свайп изменяет мощность лишь на 1EV, а более тонкая коррекция возможно только по нажатию на «минус» и «плюс» справа и слева от текущего показателя. Возможно кому-то это покажется удобным, но лично мне — нет.
Дело в том, что мне не понравилось как организована коррекция мощности вспышек: если на вспышках или трансмиттере колесико (jog dial) позволяет сразу значительно скорректировать мощность, то в приложении один свайп изменяет мощность лишь на 1EV, а более тонкая коррекция возможно только по нажатию на «минус» и «плюс» справа и слева от текущего показателя. Возможно кому-то это покажется удобным, но лично мне — нет.
Может быть возможность управлять настройками вспышек с приложения для смартфона понравится тем кто фотографирует со штатива, когда камера должна оставаться неподвижной, например, при предметной съемке, ведь в этом случае к камере и синхронизатору можно вообще не прикасаться.
Сравнения и выводы
Если сравнивать между собой вышедший в далеком 2015 году синхронизатор Godox X1T и вышедший в 2019 трансмиттер Godox X2T, то имеем следующее:
- более удобное управление, с кнопками прямого выбора нужной группы ведомых вспышек
- улучшенный экран, который стал больше, получил лучше подсветку и стал графическим
- благодаря тому что экран трансмиттера Godox X2T теперь графический, пункты меню пользовательских настроек теперь имеют внятные и понятные названия, а не как у трансмиттера Godox X1T, где пользовательские настройки были зашифрованы под кодами Fn. XX и приходилось запоминать какой номер какой функции соответствует
- режим одновременной работы нескольких фотографов (синхронизаторов) с одним комплектом ведомых фотовспышек
- возможность устанавливать параметры со смартфона по Bluetooth
- возможность блокировки органов управления трансмиттера для избежание случайного изменения настроек ведомых фотовспышек
- возможность включения моделирующего света и спикера для ведомых вспышек
- переключения режимов дальности работы с 1-100м на 0-30м теперь в меню
- регулировка мощности с шагом от 0.1EV
- подсветка кнопок
- поиск наиболее подходящих каналов
- фиксирующая шайба заменена на быстрый фиксатор
 XX и приходилось запоминать какой номер какой функции соответствует
XX и приходилось запоминать какой номер какой функции соответствуетНо также появилось и несколько, на мой взгляд, ухудшений, а именно:
- стандартный разъем PCSync заменен на jack
- разъем синхронизации и USB разъем для обновления прошивок лишись резиновой заглушки
- нет режима работы только по центральному контакту, что несколько раз пригодилось мне
На мой взгляд Godox X2T по функционалу вплотную приблизился к Godox Xpro, хуже он только по таким параметрам:
- меньший экран, на котором помещаются одновременно только параметры трех групп (у Godox Xpro — все пять). А в большинстве случаев три группы достаточно. Судите сами: группа А — рисующий, B — заполняющий, и C — либо контровой (контурный) свет либо фоновый.
- отсутствует кнопка TCM (TTL-Convert-Manual, для быстрого и комфортного перехода с TTL режима в режим ручного управления мощностью, с копированием использованных значений мощности из TTL в Manual)
- менее наглядное управление положение зума ведомых вспышек и отсутствие возможности индивидуальной установки положения зума для каждой отдельной группы ведомых вспышек
- меньшее количество органов управления (кнопочек)
 А в большинстве случаев три группы достаточно. Судите сами: группа А — рисующий, B — заполняющий, и C — либо контровой (контурный) свет либо фоновый.
А в большинстве случаев три группы достаточно. Судите сами: группа А — рисующий, B — заполняющий, и C — либо контровой (контурный) свет либо фоновый.Проведя несколько съемок могу сказать что управление стало намного более удобным: теперь можно удерживая камеру правой рукой, а левой полностью выставить или изменить параметры работы вспышек, в отличии от X1T, где либо левая рука прикрывала экран, либо приходилось перехватывать камеру в левую руку и вытащив правую руку из кистевого ремня управлять синхронизатором.
После получения трансмиттеров я на первые несколько съемок брал и X1T и X2T чтобы сравнить их непосредственно в работе, и чем больше я использовал X2T, тем меньше мне хотелось возвращаться на X1T. Так что я считаю что у Godox получилось существенно улучшить и переработать «младшую» версию трансмиттера, в тоже время удачно попав в нишу между Godox X1t и Godox XPro.
Так что я считаю что у Godox получилось существенно улучшить и переработать «младшую» версию трансмиттера, в тоже время удачно попав в нишу между Godox X1t и Godox XPro.
На сайте производителя можно прочитать о трансмиттере Godox X2T и скачать инструкцию, а когда появится, то и новую версию прошивки.
Tрансмиттеры Godox X2T уже доступны к покупке на Ebay и Aliexpress, а также буквально на днях будут доступны в магазине gox.com.ua
И конечно же, на сайте Adorama, где в продаже есть полный ассортимент продукции Godox (под брендом Flashpoint), трансмиттер Godox X2T доступен к покупке как Flashpoint R2 Mark II.
P.S. И не важно где вы будете покупать трансмиттер Godox X2T, дополнительно сэкономить на этой и других покупках можно используя кэшбэк-сервисы. Я пользуюсь ePN Cashback и Letyshops в зависимости от того, где на момент покупки более выгодные условия. Тем более что в них представлены не только магазины, но и сервисы заказа отелей, покупки билетов и т. д.
д.
Ведь как говорил Скрудж МакДак он же дядя Скрудж:
Деньги сэкономленные — есть деньги заработанные
Удачных кадров!
GEON TerraX Cross 85 / 2T
Это самая малокубатурная спортивная техника бренда Geon, но при этом одна из мощнейших!
Модель TerraX 85 предназначена не только для детей и подростков. Мотоцикл, как и его 4-тактный собрат подойдет и для взрослых людей, которые хотят испытать адреналин мотокросса, но не имеют возможности преодолеть полноразмерную 250-ку на колесной формуле 21/18 с высотой сиденья под 100см.
Небольшая масса и габариты сочетаются в этой модели с легкой управляемостью. Мотоцикл получился на столько легким, что им без труда сможет управлять подросток.
Простая конструкция в то же время отличается высокой прочностью и надежностью, как и должно быть для любой кроссовой техники. 85-кубовый двигатель TerraX 2T гармонично сочетается с 6-ступенчатой трансмиссией. Он обеспечит высокую мощность и контролируемую тягу. Коленвал сбалансирован прецизионно с целью ослабить уровень вибраций. При этом вращающаяся инерция коленчатого вала обеспечивает высокий крутящий момент. Система питания представлена современным карбюратором.
Коленвал сбалансирован прецизионно с целью ослабить уровень вибраций. При этом вращающаяся инерция коленчатого вала обеспечивает высокий крутящий момент. Система питания представлена современным карбюратором.
Благодаря никосиловой технологии обработки поверхности цилиндра обеспечивается лучшее скольжение поршня и как следствие уменьшается потеря мощности.
Многодисковое сцепление Geon TerraX 85 приводится в действие гидравлическим приводом.
Короб воздушного фильтра обеспечивает необходимую защиту от загрязнения фильтрующего элемента. Внутри короба установлен большой воздушный фильтр TwinAir. Воздушный фильтр можно заменить без инструментов за несколько секунд — пластиковая крышка закрывается на защелки.
Система выпуска отработанных газов специально разработана для этого двигателя и способствует полной реализации потенциала мотоцикла. Глушитель достаточно короткий для улучшения централизации масс.
Легкая и прочная рама Geon TerraX 85 сделана из стали, что обеспечивает хорошую жесткость на скручивание, устойчивость к ударам и вибрациям — баланс и управляемость. А полностью регулируемая перевернутая вилка оптимизирована для лучшего демпфирования. Отзывчивая передняя подвеска с ходом более 260мм хорошо отрабатывает все неровности покрытия и резкие изменения направления движения. Доступные регулирования преднатяга пружины и демпфирования отбоя.
А полностью регулируемая перевернутая вилка оптимизирована для лучшего демпфирования. Отзывчивая передняя подвеска с ходом более 260мм хорошо отрабатывает все неровности покрытия и резкие изменения направления движения. Доступные регулирования преднатяга пружины и демпфирования отбоя.
Сзади установлен полностью регулируемый амортизатор. Большая прогрессия и обратная связь усиливаются за счет правильно просчитанных углов. Ход заднего колеса составляет 400 мм.
Тормозная система с 2-поршневыми суппортами и 240 мм дисковым тормозным диском спереди, а также 2-поршневой суппорт и задний тормозной диск 240 мм сзади обеспечивают эффективное замедление и высокий контроль. Дисковые тормоза повышают управляемость модели и уровень безопасности.
Связка «рама-тормоза-подвеска» настроены и подобраны так, чтобы обеспечить максимально возможную производительность для этого байка и реализацию его потенциала. Эргономические параметры придают уверенность в управлении. Зубастые подножки обеспечивают надежный контакт для полного контроля.
Легкие алюминиевые диски TerraX Сross оснащены шинами Innova и обеспечивают высокую производительность на бездорожье. Спереди стоит 19те, а сзади 16те колесо — мировой стандарт для среднеразмерных кросс-байков. Рисунок протектора обеспечивает высокую продольную устойчивость в сочетании с отличным зацепом и точностью управления.
Топливный бак имеет емкость 5 литров. Учитывая назначение мотоцикла, такого объема бака будет достаточно для тренировочных поездок и гоночных заездов на трассе.
Радиаторы разработаны с учетом оптимизации воздушного потока и контура охлаждения. Система охлаждения эффективно отводит тепло от двигателя для достижения максимальной производительности в широком диапазоне условий и, конечно, продление срока полезной эксплуатации. Жалюзи защищают радиаторы от камней и грязи.
Прочное шасси с єнергоемкой подвеской, мощной двигатель, высокотехнологичные компоненты — все это, в сочетании с низким весом обеспечивает именно тот эффект, на который вы рассчитываете.
У модели обязательно найдется много своих поклонников. Это отличный выбор для начинающих участников соревнований по мотокроссу а так же и профессионалов высокого уровня, которым необходим недорогой в приобретении и обслуживании «снаряд» для регулярных тренировок. TerraX Сross85 заслуживает право называться одним из лучших байков для успешного старта в мотокроссе.
Хотя! Этот байк просто отличный генератор адреналина для поклонников острых ощущений. Такое сочетание низкого веса и высокой мощности заставляет бежать мурашки от одного только предвкушения поездки.
| 1 | Найдите производную — d / dx | натуральное журнал x | |
| 2 | Оцените интеграл | интеграл натурального логарифма x относительно x | |
| 3 | Найдите производную — d / dx | е ^ х | |
| 4 | Оцените интеграл | интеграл от e ^ (2x) относительно x | |
| 5 | Найдите производную — d / dx | 1 / х | |
| 6 | Найдите производную — d / dx | х ^ 2 | |
| 7 | Найдите производную — d / dx | 1 / (х ^ 2) | |
| 8 | Найдите производную — d / dx | грех (х) ^ 2 | |
| 9 | Найдите производную — d / dx | сек (x) | |
| 10 | Оцените интеграл | интеграл e ^ x относительно x | |
| 11 | Оцените интеграл | интеграл x ^ 2 относительно x | |
| 12 | Оцените интеграл | интеграл квадратного корня x относительно x | |
| 13 | Найдите производную — d / dx | соз (х) ^ 2 | |
| 14 | Оцените интеграл | интеграл от 1 / x по отношению к x | |
| 15 | Оцените интеграл | интеграл sin (x) ^ 2 относительно x | |
| 16 | Найдите производную — d / dx | х ^ 3 | |
| 17 | Найдите производную — d / dx | сек (x) ^ 2 | |
| 18 | Оцените интеграл | интеграл cos (x) ^ 2 относительно x | |
| 19 | Оцените интеграл | интеграл от sec (x) ^ 2 относительно x | |
| 20 | Найдите производную — d / dx | е ^ (х ^ 2) | |
| 21 | Оцените интеграл | интеграл от 0 до 1 кубического корня из 1 + 7x относительно x | |
| 22 | Найдите производную — d / dx | грех (2x) | |
| 23 | Найдите производную — d / dx | загар (x) ^ 2 | |
| 24 | Оцените интеграл | интеграл 1 / (x ^ 2) относительно x | |
| 25 | Найдите производную — d / dx | 2 ^ х | |
| 26 | График | натуральное бревно из | |
| 27 | Найдите производную — d / dx | cos (2x) | |
| 28 | Найдите производную — d / dx | хе ^ х | |
| 29 | Оцените интеграл | интеграл от 2x относительно x | |
| 30 | Найдите производную — d / dx | (натуральный логарифм x) ^ 2 | |
| 31 | Найдите производную — d / dx | натуральный логарифм (x) ^ 2 | |
| 32 | Найдите производную — d / dx | 3x ^ 2 | |
| 33 | Оцените интеграл | интеграл xe ^ (2x) относительно x | |
| 34 | Найдите производную — d / dx | 2e ^ x | |
| 35 | Найдите производную — d / dx | натуральное бревно 2x | |
| 36 | Найдите производную — d / dx | -sin (х) | |
| 37 | Найдите производную — d / dx | 4x ^ 2-x + 5 | |
| 38 | Найдите производную — d / dx | y = 16 корень четвертой степени из 4x ^ 4 + 4 | |
| 39 | Найдите производную — d / dx | 2x ^ 2 | |
| 40 | Оцените интеграл | интеграл от e ^ (3x) относительно x | |
| 41 | Оцените интеграл | интеграл cos (2x) относительно x | |
| 42 | Найдите производную — d / dx | 1 / (квадратный корень из x) | |
| 43 | Оцените интеграл | интеграл e ^ (x ^ 2) относительно x | |
| 44 | Оценить | e ^ бесконечность | |
| 45 | Найдите производную — d / dx | х / 2 | |
| 46 | Найдите производную — d / dx | -cos (x) | |
| 47 | Найдите производную — d / dx | грех (3x) | |
| 48 | Найдите производную — d / dx | 1 / (х ^ 3) | |
| 49 | Оцените интеграл | интеграл tan (x) ^ 2 относительно x | |
| 50 | Оцените интеграл | интеграл 1 по x | |
| 51 | Найдите производную — d / dx | х ^ х | |
| 52 | Найдите производную — d / dx | x натуральное бревно x | |
| 53 | Найдите производную — d / dx | х ^ 4 | |
| 54 | Оценить предел | предел, когда x приближается к 3 из (3x-5) / (x-3) | |
| 55 | Оцените интеграл | интеграл x ^ 2 натуральный логарифм x относительно x | |
| 56 | Найдите производную — d / dx | f (x) = квадратный корень из x | |
| 57 | Найдите производную — d / dx | х ^ 2sin (х) | |
| 58 | Оцените интеграл | интеграл sin (2x) относительно x | |
| 59 | Найдите производную — d / dx | 3e ^ x | |
| 60 | Оцените интеграл | интеграл xe ^ x относительно x | |
| 61 | Найдите производную — d / dx | у = х ^ 2 | |
| 62 | Найдите производную — d / dx | квадратный корень из x ^ 2 + 1 | |
| 63 | Найдите производную — d / dx | грех (x ^ 2) | |
| 64 | Оцените интеграл | интеграл от e ^ (- 2x) относительно x | |
| 65 | Оцените интеграл | интеграл натурального логарифма квадратного корня x относительно x | |
| 66 | Найдите производную — d / dx | е ^ 2 | |
| 67 | Найдите производную — d / dx | х ^ 2 + 1 | |
| 68 | Оцените интеграл | интеграл sin (x) относительно x | |
| 69 | Найдите производную — d / dx | арксин (х) | |
| 70 | Оценить предел | предел, когда x приближается к 0 of (sin (x)) / x | |
| 71 | Оцените интеграл | интеграл e ^ (- x) относительно x | |
| 72 | Найдите производную — d / dx | х ^ 5 | |
| 73 | Найдите производную — d / dx | 2 / х | |
| 74 | Найдите производную — d / dx | натуральное бревно из 3х | |
| 75 | Найдите производную — d / dx | х ^ (1/2) | |
| 76 | Найдите производную — d / d @ VAR | f (x) = квадратный корень из x | |
| 77 | Найдите производную — d / dx | соз (х ^ 2) | |
| 78 | Найдите производную — d / dx | 1 / (х ^ 5) | |
| 79 | Найдите производную — d / dx | кубический корень из x ^ 2 | |
| 80 | Оцените интеграл | интеграл cos (x) относительно x | |
| 81 | Оцените интеграл | интеграл e ^ (- x ^ 2) относительно x | |
| 82 | Найдите производную — d / d @ VAR | е (х) = х ^ 3 | |
| 83 | Оцените интеграл | интеграл от 0 до 10 из 4x ^ 2 + 7 по x | |
| 84 | Оцените интеграл | интеграл (натуральный логарифм x) ^ 2 относительно x | |
| 85 | Найдите производную — d / dx | журнал x | |
| 86 | Найдите производную — d / dx | арктан (х) | |
| 87 | Найдите производную — d / dx | натуральное бревно 5x | |
| 88 | Найдите производную — d / dx | 5e ^ x | |
| 89 | Найдите производную — d / dx | cos (3x) | |
| 90 | Оцените интеграл | интеграл x ^ 3 относительно x | |
| 91 | Оцените интеграл | интеграл x ^ 2e ^ x относительно x | |
| 92 | Найдите производную — d / dx | Корень четвертой степени из 4x ^ 4 + 4 (16) | |
| 93 | Найдите производную — d / dx | х / (е ^ х) | |
| 94 | Оценить предел | предел, когда x приближается к 3 от arctan (e ^ x) | |
| 95 | Оцените интеграл | интеграл от (e ^ x-e ^ (- x)) / (e ^ x + e ^ (- x)) относительно x | |
| 96 | Найдите производную — d / dx | 3 ^ х | |
| 97 | Оцените интеграл | интеграл xe ^ (x ^ 2) относительно x | |
| 98 | Найдите производную — d / dx | 2sin (x) | |
| 99 | Оценить | сек (0) ^ 2 | |
| 100 | Найдите производную — d / dx | натуральный логарифм x ^ 2 |
Найдите d 2 y над d x в квадрате для кривой, заданной x = 2t + 5, и y равняется 3 раза t над 2
Кэмерон Л.
Найдите кривую x = 2t + 5 и
| A | |
| Б | |
| К | 1 |
| D | 0 |
Более
dy / dx = dy / dt / (dx / dt)
dx / dt = 2
dy / dt = 3/2
dy / dx = (3/2) / 2 = 3/4
d 2 y / dx 2 = 0 Ответ D)
Все еще ищете помощь? Получите правильный ответ быстро.
ИЛИ
Найдите онлайн-репетитора сейчас Выберите эксперта и познакомьтесь онлайн. Никаких пакетов или подписок, платите только за необходимое время.
Никаких пакетов или подписок, платите только за необходимое время.
¢ € £ ¥ ‰ µ · • § ¶ SS ‹ › « » < > ≤ ≥ — — ¯ ‾ ¤ ¦ ¨ ¡ ¿ ˆ ˜ ° — ± ÷ ⁄ × ƒ ∫ ∑ ∞ √ ∼ ≅ ≈ ≠ ≡ ∈ ∉ ∋ ∏ ∧ ∨ ¬ ∩ ∪ ∂ ∀ ∃ ∅ ∇ * ∝ ∠ ´ ¸ ª º † ‡ А Á Â Ã Ä Å Æ Ç È É Ê Ë Я Я Я Я Ð Ñ Ò Ó Ô Õ Ö Ø Œ Š Ù Ú Û Ü Ý Ÿ Þ à á â ã ä å æ ç è é ê ë я я я я ð ñ ò ó ô х ö ø œ š ù ú û ü ý þ ÿ Α Β Γ Δ Ε Ζ Η Θ Ι Κ Λ Μ Ν Ξ Ο Π Ρ Σ Τ Υ Φ Χ Ψ Ω α β γ δ ε ζ η θ ι κ λ μ ν ξ ο π ρ ς σ τ υ φ χ ψ ω ℵ ϖ ℜ ϒ ℘ ℑ ← ↑ → ↓ ↔ ↵ ⇐ ⇑ ⇒ ⇓ ⇔ ∴ ⊂ ⊃ ⊄ ⊆ ⊇ ⊕ ⊗ ⊥ ⋅ ⌈ ⌉ ⌊ ⌋ 〈 〉 ◊
Как найти ускорение — Расчет 1
Если вы считаете, что контент, доступный через Веб-сайт (как определено в наших Условиях обслуживания), нарушает
или другие ваши авторские права, сообщите нам, отправив письменное уведомление («Уведомление о нарушении»), содержащее
то
информацию, описанную ниже, назначенному ниже агенту. Если репетиторы университета предпримут действия в ответ на
ан
Уведомление о нарушении, оно предпримет добросовестную попытку связаться со стороной, которая предоставила такой контент
средствами самого последнего адреса электронной почты, если таковой имеется, предоставленного такой стороной Varsity Tutors.
Если репетиторы университета предпримут действия в ответ на
ан
Уведомление о нарушении, оно предпримет добросовестную попытку связаться со стороной, которая предоставила такой контент
средствами самого последнего адреса электронной почты, если таковой имеется, предоставленного такой стороной Varsity Tutors.
Ваше Уведомление о нарушении прав может быть отправлено стороне, предоставившей доступ к контенту, или третьим лицам, таким как в виде ChillingEffects.org.
Обратите внимание, что вы будете нести ответственность за ущерб (включая расходы и гонорары адвокатам), если вы существенно искажать информацию о том, что продукт или действие нарушает ваши авторские права.Таким образом, если вы не уверены, что контент находится на Веб-сайте или по ссылке с него нарушает ваши авторские права, вам следует сначала обратиться к юристу.
Чтобы отправить уведомление, выполните следующие действия:
Вы должны включить следующее:
Физическая или электронная подпись правообладателя или лица, уполномоченного действовать от их имени;
Идентификация авторских прав, которые, как утверждается, были нарушены;
Описание характера и точного местонахождения контента, который, по вашему мнению, нарушает ваши авторские права, в \
достаточно подробностей, чтобы позволить репетиторам университетских школ найти и точно идентифицировать этот контент; например, мы требуем
а
ссылка на конкретный вопрос (а не только на название вопроса), который содержит содержание и описание
к какой конкретной части вопроса — изображению, ссылке, тексту и т. д. — относится ваша жалоба;
Ваше имя, адрес, номер телефона и адрес электронной почты; а также
Ваше заявление: (а) вы добросовестно полагаете, что использование контента, который, по вашему мнению, нарушает
ваши авторские права не разрешены законом, владельцем авторских прав или его агентом; (б) что все
информация, содержащаяся в вашем Уведомлении о нарушении, является точной, и (c) под страхом наказания за лжесвидетельство, что вы
либо владелец авторских прав, либо лицо, уполномоченное действовать от их имени.
д. — относится ваша жалоба;
Ваше имя, адрес, номер телефона и адрес электронной почты; а также
Ваше заявление: (а) вы добросовестно полагаете, что использование контента, который, по вашему мнению, нарушает
ваши авторские права не разрешены законом, владельцем авторских прав или его агентом; (б) что все
информация, содержащаяся в вашем Уведомлении о нарушении, является точной, и (c) под страхом наказания за лжесвидетельство, что вы
либо владелец авторских прав, либо лицо, уполномоченное действовать от их имени.
Отправьте жалобу нашему уполномоченному агенту по адресу:
Чарльз Кон
Varsity Tutors LLC
101 S. Hanley Rd, Suite 300
St. Louis, MO 63105
Или заполните форму ниже:
Light Vehicle Red-X 2T, Тип упаковки: Бутылка, 365 рупий / шт Volubit Lubricant Industries
Легкий автомобиль Red-X 2T, Тип упаковки: Бутылка, 365 рупий / шт Volubit Lubricant Industries | ID: 22419531688Спецификация продукта
| Тип транспортного средства | Легковой автомобиль | |
| Модель / класс | Red-X 2T | |
| Размер упаковки | 500 мл, 1 л, 10 л, 20 л, 55 л, 210 л. | |
| Тип упаковки | Бутылка | |
| Марка | VOLUBIT | |
| Использование / применение | Промышленное | |
| Минимальное количество заказа | 200 штук 9000 905 |
| Срок поставки | В тот же день |
| Производственные мощности | 500Box |
| Детали упаковки | 500 мл / 1 л / 10 л / 20 л / 55 л / 210 л. |
Заинтересовал этот товар? Получите последнюю цену от продавца
Связаться с продавцом
Видео о продукте
Изображение продукта
О компании
Год основания 2010
Юридический статус фирмы Партнерство Фирма
Характер бизнеса Производитель
Количество сотрудников от 11 до 25 человек
Годовой оборот Rs. 2–5 крор
2–5 крор
Участник IndiaMART с августа 2015 г.
GST24AAQFV8298M1Z0
Код импорта и экспорта (IEC) AAQFV *****
Вернуться к началу 1 Есть потребность?
Получите лучшую цену
Есть потребность?
Получите лучшую цену
Муфта блокировки кольца 75 мм x 2 т, 75 мм, 3 дюйма
Описание
Муфта блокировки кольца 75 мм x 2 т — 75 мм, отверстие 3 дюйма, кольцо шириной 41 мм
Щелкните изображение, чтобы купить
Кольцевая перекидная муфта 75 мм x 2 т подходит для всех типов крючков Pintle.
- Ширина корректирующего кольца составляет 40 мм
- 4 Расстояние между отверстиями 184 мм x 54 м x 1/2 дюйма
- Эта кольцевая муфта имеет вращение на 360 градусов
Используйте крюки-штыри при подсоединении кольцевой муфты 75 мм к буксировке транспортное средство.
Минимальное требуемое значение D для GVM по сравнению с ATM
Чтобы рассчитать минимальное значение D-Value (кН) для муфт, выберите ближайшую GVM вашего автомобиля и ближайший рейтинг ATM или буксировочного устройства в раскрывающемся меню ниже.- Выберите Буксировка автомобиля GVM (кг) *
Автомобиль GVM в (кг) 500055006000650070007500800085005001000010500110001150012000125001300013500140001450015000155001600016500170001750018000185001
950020000
- ATM (кг) фаркопа Рейтинг *
ATM / фаркопа Оценка в (кг) 500100015002000250030003500400045005000550060006500700075008000850050010000110001200013000140001500016000170001800010000
- Минимальное требуемое D-Value в кН
75 мм x 2 т. Кольцевые муфты обеспечивают большую гибкость по сравнению с шаровыми муфтами и с меньшей вероятностью расцепляются на пересеченной или неровной местности.
Кольцевые муфты обеспечивают большую гибкость по сравнению с шаровыми муфтами и с меньшей вероятностью расцепляются на пересеченной или неровной местности.
Кольцевые муфты 75 мм грузоподъемностью более 2 т используются в качестве буксирных крюков на прицепах до 40 т. Ограничивающим фактором в этой шкворневой муфте блокировки является пружина внутри корпуса. Этот спринт ограничивает нагрузку до 2 тонн.
Ограничение поворота при реверсировании
Парковочная плита основания муфты от Trigg Bros необходима для использования на муфтах с поворотным кольцом для ограничения вращения.
Ограниченное вращение помогает предотвратить серьезные повреждения кольцевых муфт. Удлиненный конец стояночного тормоза предотвращает чрезмерное вращение.Уплотнения нижнего основания перекрывают муфты, предотвращая вытекание смазки.
Водители также должны знать о возможности переворота складного ножа на заданный угол. Довольно часто водитель не замечает, что складной нож происходит на очень низких скоростях.
Важно, будьте осторожны при движении задним ходом, так как неровная поверхность может привести к скручиванию муфты и изгибу головки крюка иглы.
В результате поворота на острые углы (подъемный механизм) вал кольцевой муфты изгибается.
Волосные переломы
Мы обнаружили, что во время событий складного ножа муфты не ломаются мгновенно. Однако микротрещины со временем развиваются и увеличиваются до тех пор, пока не произойдет расслоение.
Событие будет относительно незначительным и покажется незначительным. По правде говоря, кумулятивные переломы с течением времени наконец привели к разделению. О расслоении свидетельствуют следы ржавчины на голом металле.
Обучение водителей
Обучение водителей — ключ к безопасному вождению. Перед вождением необходимо осмотреть автомобиль и прицеп, особенно сильно изнашиваемые детали.
При обнаружении признаков износа сообщите об этом своему непосредственному руководителю и / или зарегистрируйте событие для собственной защиты.
Список доступных кольцевых муфт и буксировочных проушин:
Компания «Couplemate Trailer Parts» продает только лучшее качество. Запчасти для муфт и прицепов 75 мм x 2 т. По всей Австралии.
Клиенты могут забрать товар или воспользоваться нашими низкими тарифами на перевозку. Экспресс-доставка в Мельбурн, Сидней, Брисбен, Перт, Аделаиду, Дарвин и Хобарт.
Мы также отправляем товары в Новую Зеландию авиапочтой Австралии.
© Steve Wotherspoon 13 декабря 2014 г. Изображения и текст могут быть скопированы при условии ссылки на скопированную страницу и при отображении источника там, где находится контент или изображение.
Смещение, скорость и ускорение расчетным методом
В этой статье мы изучим, как найти смещение, скорость и ускорение частицы с помощью метода исчисления.
Пример — 01:
Частица движется таким образом, что смещение ’s’ в любой момент времени ‘t’ определяется как s = 2t 2 + 5t +20. Найдите скорость и ускорение частицы через 2 секунды.
Найдите скорость и ускорение частицы через 2 секунды.
Решение:
Смещение частицы задается формулой
.с = 2т 2 + 5т +20 ……………… (1)
Дифференцируя обе части уравнения (1) относительно т
Скорость = v = ds / dt = 4t + 5 ……………… (2)
Дифференцируя обе части уравнения (2) относительно т
Ускорение = a = dv / dt = 4 ……………… (3)
Чтобы найти скорость через 2 секунды i.е. t = 2 с
Подставляя в уравнение (2)
Скорость = v = 4 (2) + 5 = 8 + 5 = 13 ед / с
Чтобы найти ускорение через 2 секунды, т.е. t = 2 с
Ускорение = a = 4 ед. / С 2
Ответ: Скорость и ускорение частицы через 2 секунды составляют 13 единиц / с и 4 единицы / с 2 соответственно.
Пример — 02:
Смещение s частицы в момент времени t определяется как s = 5 + 20t — 2t 2 .Найдите его ускорение, когда его скорость равна нулю.
Решение:
Смещение частицы задается формулой
.с = 5 + 20т — 2т 2 ……………… (1)
Дифференцируя обе части уравнения (1) относительно т
Скорость = v = ds / dt = 20 — 4t ……………… (2)
Дифференцируя обе части уравнения (2) относительно т
Ускорение = a = dv / dt = — 4 ……………… (3)
Заданная скорость равна нулю
20 — 4t = 0
4т = 20
T = 5 с
Чтобы найти ускорение через 5 секунд i.е. t = 5 с
Ускорение = a = — 4 ед. / С 2
Ответ: Ускорение частицы через 5 секунд — 4 ед. / С 2
Пример — 03:
Частица движется таким образом, что «смещение» в любой момент времени «t» определяется как s = t 3 — 4t 2 — 5t. Найдите скорость и ускорение частицы через 2 секунды.
Решение:
Смещение частицы задается формулой
.
s = t 3 — 4t 2 — 5t ……………… (1)
Дифференцируя обе части уравнения (1) w.r.t. т
Скорость = v = ds / dt = 3t 2 -8t -5 ……………… (2)
Дифференцируя обе части уравнения (2) относительно т
Ускорение = a = dv / dt = 6t — 8 ……………… (3)
Найти скорость через 2 секунды, т.е. t = 2 с
Подставляя в уравнение (2)
Скорость = v = 3 (2) 2 -8 (2) -5 = 12-16-5 = -9 ед / с
Чтобы найти ускорение через 2 секунды, т.е. t = 2 с
Ускорение = a = 6 (2) — 8 = 12 — 8 = 4 единицы / с 2
Ответ: Скорость и ускорение частицы через 2 секунды составляют — 9 единиц / с и 4 единицы / с 2 соответственно.
Пример — 04:
Частица движется таким образом, что смещение ‘в любой момент’ t ‘определяется как s = 2t 3 — 5t 2 + 4t — 3. Найдите время, когда ускорение составляет 14 фут / с 2 . Также найдите в это время скорость и смещение.
Также найдите в это время скорость и смещение.
Решение:
Смещение частицы задается формулой
.с = 2т 3 — 5т 2 + 4т — 3 ……………… (1)
Дифференцируя обе части уравнения (1) w.r.t. т
Скорость = v = ds / dt = 6t 2 — 10t + 4 ……………… (2)
Дифференцируя обе части уравнения (2) относительно т
Ускорение = a = dv / dt = 12t — 10 ……………… (3)
Заданное ускорение = a = 14 фут / с 2
Подставляем в уравнение (3)
12т — 10 = 14
12 т = 24
T = 2 с
Подставляя t = 2 в уравнение (2)
Скорость = v = 6t 2 — 10т + 4 = 6 (2) 2 — 10 (2) + 4 = 24-20 + 4 = 8 фут / с
Подставляя t = 2 в уравнение (1)
Смещение = s = 2 (2) 3 -5 (2) 2 + 4 (2) — 3 = 16-20 + 8-3 = 1 фут
Ответ: Через 4 с ускорение составит 14 фут / с 2
Скорость 8 футов / с, водоизмещение 1 фут
Пример — 05:
Частица движется по закону s = t 3 — 6t 2 + 9t + 15, найти скорость при t = 0
Решение:
Смещение частицы задается формулой
.
s = t 3 — 6t 2 + 9t + 15 ……………… (1)
Дифференцируя обе части уравнения (1) w.r.t. т
Скорость = v = ds / dt = 3t 2 — 12t + 9 ……………… (2)
Найти скорость при t = 0
Подставляя t = 0 в уравнение (2)
Скорость = v = 3t (0) 2 — 12t (0) + 9 = 9 единиц / с
Ответ: Скорость при t = 0 составляет 9 единиц / с
Пример — 06:
Частица движется по закону s = t 3 — 4t 2 — 5t. Найдите смещение и скорость частицы, когда ее ускорение составляет 4 единицы.
Решение:
Смещение частицы задается формулой
.s = t 3 — 4t 2 — 5t ……………… (1)
Дифференцируя обе части уравнения (1) относительно t
Скорость = v = ds / dt = 3t 2 — 8t — 5 ……………… (2)
Дифференцируя обе части уравнения (2) относительно т
Ускорение = a = dv / dt = 6t — 8 ……………… (3)
Заданное ускорение = a = 4 единицы
Подставляя в уравнение (3)
6т — 8 = 4
6т = 12
t = 2 с
Подставляя t = 2 в уравнение (1)
Рабочий объем = s = (2) 3 -4 (2) 2 -5 (2) = 8-16-10 = — 18 единиц
Подставляя t = 2 в уравнение (2)
Скорость = v = 3 (2) 2 — 8 (2) — 5 = 12 — 16 — 5 = — 9 единиц / с
Ответ: При ускорении 4 единицы смещение составляет -18 единиц, а скорость — 8 единиц / с
Пример — 07:
Частица движется по закону s = t 3 /3 — t 2 /2 — t / 2 +6. Найдите (i) его скорость в конце 4 с и (ii) ускорение и смещение, когда его скорость составляет 3/2 единицы.
Найдите (i) его скорость в конце 4 с и (ii) ускорение и смещение, когда его скорость составляет 3/2 единицы.
Решение:
Смещение частицы задается формулой
.s = t 3 /3 — t 2 /2 — t / 2 + 6 ……………… (1)
Дифференцируя обе части уравнения (1) относительно т
Скорость = v = ds / dt = 3t 2 /3 — 2t / 2 — 1/2 = t 2 — t — 1/2 ……………… (2)
Дифференцируя обе части уравнения (2) w.r.t. т
Ускорение = a = dv / dt = 2t — 1 ……………… (3)
(i) Чтобы найти его скорость в конце 4 с, t = 4 с
Подставляя t = 4 в уравнение (2)
Скорость = v = (4) 2 — (4) — 1/2 = 16 — 4 — 1/2 = 11,5 единиц / с
(ii) Чтобы найти ускорение и скорость, когда его скорость равна 3/2 единицы.
т 2 — т — 1/2 = 3/2
t 2 — t — 2 = 0
(t — 2) (t + 1) = 0
t — 2 = 0 и t + 1 = 0
t = 2 и t = — 1
Время не может быть отрицательным, следовательно, t = -1 невозможно
t = 2 с
Подставляя t = 2 в уравнение (3)
Ускорение = 2 (2) — 1 = 3 ед.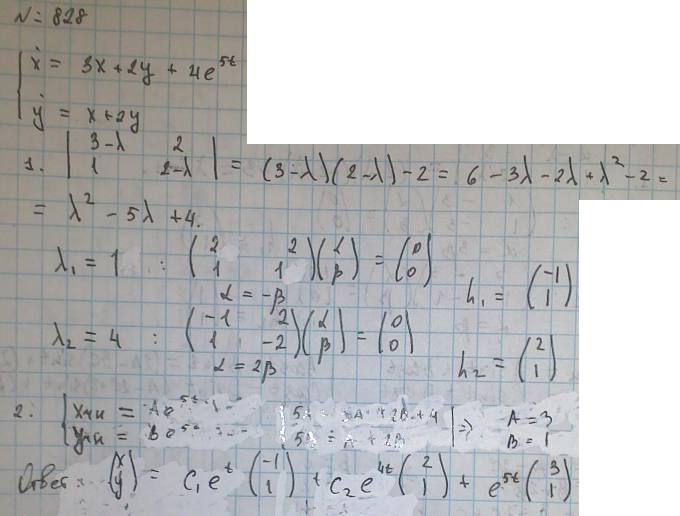 / С 2
/ С 2
Подставляя t = 2 в уравнение (1)
Рабочий объем = s = (2) 3 /3 — (2) 2 /2 — (2) / 2 +6 = 8/3 — 2-1 + 6 = 17/3 единиц
Ответ: Скорость в конце 4 с равна 11.5 шт. / С
Когда скорость составляет 3/2 единицы, ускорение составляет 3 единицы / с 2 и смещение составляет 17/3 единицы
Пример — 08:
Смещение x частицы в момент времени t определяется как x = 160 t — 16t 2 , показывают, что ее скорости при t = 1 и t = 9 равны по величине и противоположны по направлению.
Решение:
Смещение частицы задается формулой
.с = 160 т — 16 т 2 ……………… (1)
Дифференцируя обе части уравнения (1) w.r.t. т
Скорость = v = ds / dt = 160 — 32t ……………… (2)
Скорость при t = 1
Скорость = 160-32 (1) = 128 единиц / с
Скорость при t = 9
Скорость = 160 — 32 (9) = — 128 единиц / с
Мы можем видеть, что скорости при t = 1 и t = 9 равны по величине и противоположны по направлению.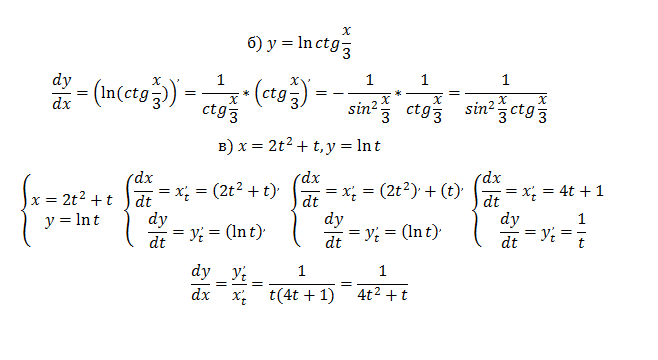 (доказано)
(доказано)
Пример — 09:
Частица движется по прямой линии, и ее смещение x от фиксированной точки O на прямой в момент времени t определяется выражением.Покажите, что ускорение в момент времени t равно x -3 .
Решение:
Смещение частицы задается формулой
.Таким образом, ускорение в момент времени t равно x -3 (Подтверждено, как требуется)
1.2 Расчет параметрических кривых — том 3
Цели обучения
- 1.2.1 Определить производные и уравнения касательных для параметрических кривых.
- 1.2.2 Найдите площадь под параметрической кривой.
- 1.2.3 Используйте уравнение для длины дуги параметрической кривой.
- 1.2.4 Примените формулу площади поверхности к объему, полученному с помощью параметрической кривой.
Теперь, когда мы ввели концепцию параметризованной кривой, наш следующий шаг — научиться работать с этой концепцией в контексте исчисления. Например, если мы знаем параметризацию данной кривой, можно ли вычислить наклон касательной к кривой? Как насчет длины дуги кривой? Или площадь под кривой?
Другой сценарий. Предположим, мы хотим изобразить положение бейсбольного мяча после того, как мяч покидает руку питчера.Если положение бейсбольного мяча представлено плоской кривой (x (t), y (t)), (x (t), y (t)), тогда мы сможем использовать математические вычисления для определения скорости движения мяча. мяч в любой момент времени. Кроме того, мы должны иметь возможность вычислить, как далеко прошел этот шар, как функцию времени.
Производные параметрических уравнений
Мы начинаем с вопроса, как вычислить наклон прямой, касательной к параметрической кривой в точке. Рассмотрим плоскую кривую, заданную параметрическими уравнениями
х (t) = 2t + 3, y (t) = 3t − 4, −2≤t≤3.х (t) = 2t + 3, y (t) = 3t − 4, −2≤t≤3.График этой кривой показан на Рисунке 1.16. Это отрезок, начинающийся в (−1, −10) (- 1, −10) и заканчивающийся в (9,5). (9,5).
Рис. 1.16 График отрезка прямой, описываемый заданными параметрическими уравнениями.
Мы можем исключить параметр, сначала решив уравнение x (t) = 2t + 3x (t) = 2t + 3 для t :
x (t) = 2t + 3x − 3 = 2tt = x − 32. x (t) = 2t + 3x − 3 = 2tt = x − 32.Подставляя это в y (t), y (t), получаем
y (t) = 3t − 4y = 3 (x − 32) −4y = 3×2−92−4y = 3×2−172.y (t) = 3t − 4y = 3 (x − 32) −4y = 3×2−92−4y = 3×2−172.Наклон этой прямой равен dydx = 32.dydx = 32. Затем мы вычисляем x ′ (t) x ′ (t) и y ′ (t) .y ′ (t). Это дает x ′ (t) = 2x ′ (t) = 2 и y ′ (t) = 3. y ′ (t) = 3. Обратите внимание, что dydx = dy / dtdx / dt = 32.dydx = dy / dtdx / dt = 32. Это не совпадение, как указано в следующей теореме.
Теорема 1.1
Производная параметрических уравнений
Рассмотрим плоскую кривую, заданную параметрическими уравнениями x = x (t) x = x (t) и y = y (t) .y = y (t). Предположим, что x ′ (t) x ′ (t) и y ′ (t) y ′ (t) существуют, и предположим, что x ′ (t) ≠ 0.х ′ (t) ≠ 0. Тогда производная dydxdydx равна
dydx = dy / dtdx / dt = y ′ (t) x ′ (t) .dydx = dy / dtdx / dt = y ′ (t) x ′ (t).1,1
Проба
Эта теорема может быть доказана с помощью цепного правила. В частности, предположим, что параметр t можно исключить, получив дифференцируемую функцию y = F (x) .y = F (x). Тогда y (t) = F (x (t)). Y (t) = F (x (t)). Дифференцируя обе части этого уравнения с помощью правила цепочки, получаем
y ′ (t) = F ′ (x (t)) x ′ (t), y ′ (t) = F ′ (x (t)) x ′ (t),так
F ′ (x (t)) = y ′ (t) x ′ (t).F ′ (x (t)) = y ′ (t) x ′ (t).Но F ′ (x (t)) = dydx, F ′ (x (t)) = dydx, что доказывает теорему.
□
Уравнение 1.1 можно использовать для вычисления производных плоских кривых, а также критических точек. Напомним, что критической точкой дифференцируемой функции y = f (x) y = f (x) является любая точка x = x0x = x0 такая, что либо f ′ (x0) = 0f ′ (x0) = 0, либо f ′ (x0 ) f ′ (x0) не существует. Уравнение 1.1 дает формулу для наклона касательной к кривой, заданной параметрически, независимо от того, может ли кривая быть описана функцией y = f (x) y = f (x) или нет.
Пример 1.4
Нахождение производной параметрической кривой
Вычислите производную dydxdydx для каждой из следующих параметрически определенных плоских кривых и найдите любые критические точки на соответствующих графиках.
- x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4
- x (t) = 2t + 1, y (t) = t3−3t + 4, −2≤t≤5x (t) = 2t + 1, y (t) = t3−3t + 4, −2≤t ≤5
- x (t) = 5cost, y (t) = 5sint, 0≤t≤2πx (t) = 5cost, y (t) = 5sint, 0≤t≤2π
Решение
- Чтобы применить уравнение 1.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2ty ′ (t) = 2. x ′ (t) = 2ty ′ (t) = 2.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 22tdydx = 1t.dydx = dy / dtdx / dtdydx = 22tdydx = 1t.
Эта производная не определена при t = 0. t = 0. Вычисление x (0) x (0) и y (0) y (0) дает x (0) = (0) 2−3 = −3x (0) = (0) 2−3 = −3 и y (0 ) = 2 (0) −1 = −1, y (0) = 2 (0) −1 = −1, что соответствует точке (−3, −1) (- 3, −1) на графике. График этой кривой представляет собой параболу, раскрывающуюся вправо, а точка (−3, −1) (- 3, −1) является ее вершиной, как показано.Рис. 1.17 График параболы, описываемый параметрическими уравнениями в части a.
- Чтобы применить уравнение 1.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2y ′ (t) = 3t2−3.x ′ (t) = 2y ′ (t) = 3t2−3.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 3t2-32.dydx = dy / dtdx / dtdydx = 3t2-32.
Эта производная равна нулю при t = ± 1. t = ± 1. При t = −1t = −1 имеем
x (−1) = 2 (−1) + 1 = −1andy (−1) = (- 1) 3−3 (−1) + 4 = −1 + 3 + 4 = 6, x (−1) = 2 (−1) + 1 = −1andy (−1) = (- 1) 3−3 (−1) + 4 = −1 + 3 + 4 = 6,
что соответствует точке (−1,6) (- 1,6) на графике.При t = 1t = 1 имеем
x (1) = 2 (1) + 1 = 3andy (1) = (1) 3−3 (1) + 4 = 1−3 + 4 = 2, x (1) = 2 (1) + 1 = 3andy (1) = (1) 3−3 (1) + 4 = 1−3 + 4 = 2,
что соответствует точке (3,2) (3,2) на графике. Точка (3,2) (3,2) является относительным минимумом, а точка (−1,6) (- 1,6) является относительным максимумом, как показано на следующем графике.Рис. 1.18 График кривой, описываемой параметрическими уравнениями в части b.
- Чтобы применить уравнение 1.1, сначала вычислите x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = — 5sinty ′ (t) = 5cost.x ′ (t) = — 5sinty ′ (t) = 5cost.
Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 5cost − 5sintdydx = −cott.dydx = dy / dtdx / dtdydx = 5cost − 5sintdydx = −cott.
Эта производная равна нулю, когда cost = 0cost = 0, и не определена, когда sint = 0. sint = 0. Это дает t = 0, π2, π, 3π2 и 2πt = 0, π2, π, 3π2 и 2π в качестве критических точек для t. Подставляя каждое из них в x (t) x (t) и y (t), y (t), получаемtt х (т) х (т) г (т) г (т) 0 5 0 π2π2 0 5 ππ −5 0 3π23π2 0 −5 2π2π 5 0
Эти точки соответствуют сторонам, верху и низу круга, который представлен параметрическими уравнениями (рисунок 1.19). На левом и правом краях круга производная не определена, а сверху и снизу производная равна нулю.Рис. 1.19 График кривой, описываемой параметрическими уравнениями в части c.
КПП 1.4
Вычислить производную dy / dxdy / dx для плоской кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3и найдите критические точки на его графике.
Пример 1.5
Поиск касательной
Найдите уравнение касательной к кривой, определяемой уравнениями
x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4whent = 2. x (t) = t2−3, y (t) = 2t − 1, −3≤t≤ 4whent = 2.Решение
Сначала найдите наклон касательной с помощью уравнения 1.1, что означает вычисление x ′ (t) x ′ (t) и y ′ (t): y ′ (t):
x ′ (t) = 2ty ′ (t) = 2. x ′ (t) = 2ty ′ (t) = 2.Затем подставьте их в уравнение:
dydx = dy / dtdx / dtdydx = 22tdydx = 1t.dydx = dy / dtdx / dtdydx = 22tdydx = 1t.Когда t = 2, t = 2, dydx = 12, dydx = 12, значит, это наклон касательной. Вычисление x (2) x (2) и y (2) y (2) дает
x (2) = (2) 2−3 = 1andy (2) = 2 (2) −1 = 3, x (2) = (2) 2−3 = 1andy (2) = 2 (2) −1 = 3,, что соответствует точке (1,3) (1,3) на графике (рисунок 1.20). Теперь используйте форму точки наклона уравнения прямой, чтобы найти уравнение касательной:
y − y0 = m (x − x0) y − 3 = 12 (x − 1) y − 3 = 12x − 12y = 12x + 52. y − y0 = m (x − x0) y − 3 = 12 (x− 1) y − 3 = 12x − 12y = 12x + 52. Рис. 1.20. Касательная к параболе, описываемой данными параметрическими уравнениями при t = 2.т = 2.КПП 1.5
Найдите уравнение касательной к кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤10whent = 5. x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤ 10whent = 5.Производные второго порядка
Наша следующая цель — увидеть, как взять вторую производную функции, определенной параметрически. Вторая производная функции y = f (x) y = f (x) определяется как производная от первой производной; то есть
d2ydx2 = ddx [dydx] .d2ydx2 = ddx [dydx].Поскольку dydx = dy / dtdx / dt, dydx = dy / dtdx / dt, мы можем заменить yy в обеих частях этого уравнения на dydx.dydx. Это дает нам
d2ydx2 = ddx (dydx) = (d / dt) (dy / dx) dx / dt. d2ydx2 = ddx (dydx) = (d / dt) (dy / dx) dx / dt.1,2
Если мы знаем dy / dxdy / dx как функцию от t, , то эту формулу легко применить.
Пример 1.6
Поиск второй производной
Вычислите вторую производную d2y / dx2d2y / dx2 для плоской кривой, заданной параметрическими уравнениями x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4.x (t) = t2−3, y (t) = 2t − 1, −3≤t≤4.
Решение
Из примера 1.4 мы знаем, что dydx = 22t = 1t.dydx = 22t = 1t. Используя уравнение 1.2, получаем
d2ydx2 = (d / dt) (dy / dx) dx / dt = (d / dt) (1 / t) 2t = −t − 22t = −12t3.d2ydx2 = (d / dt) (dy / dx) dx / dt = (d / dt) (1 / t) 2t = −t − 22t = −12t3.КПП 1.6
Вычислите вторую производную d2y / dx2d2y / dx2 для плоской кривой, определяемой уравнениями
x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3x (t) = t2−4t, y (t) = 2t3−6t, −2≤t≤3и найдите критические точки на его графике.
Интегралы, содержащие параметрические уравнения
Теперь, когда мы увидели, как вычислить производную плоской кривой, возникает следующий вопрос: как найти площадь под кривой, заданной параметрически? Напомним циклоиду, определяемую уравнениями x (t) = t − sint, y (t) = 1 − cost.x (t) = t − sint, y (t) = 1 − cost. Предположим, мы хотим найти площадь заштрихованной области на следующем графике.
Рисунок 1.21 График циклоиды с выделенной аркой над [0,2π] [0,2π].Чтобы вывести формулу для площади под кривой, определенной функциями
x = x (t), y = y (t), a≤t≤b, x = x (t), y = y (t), a≤t≤b, мы предполагаем, что x (t) x (t) дифференцируема, и начинаем с равного разбиения интервала a≤t≤b.а≤t≤b. Предположим, что t0 = a Рис. 1.22. Аппроксимация площади под параметрически заданной кривой. Мы используем прямоугольники для аппроксимации площади под кривой. Высота типичного прямоугольника в этой параметризации равна y (x (t – i)) y (x (t – i)) для некоторого значения t – it – i в подынтервале i , а ширину можно вычислить как x (ti) −x (ti − 1) .x (ti) −x (ti − 1). Таким образом, площадь прямоугольника и равна Тогда сумма Римана для площади равна Умножение и деление каждой площади на ti − ti − 1ti − ti − 1 дает Если принять предел по мере приближения nn к бесконечности, получим Это приводит к следующей теореме. Теорема 1.2 Рассмотрим несамопересекающуюся плоскую кривую, заданную параметрическими уравнениями и предположим, что x (t) x (t) дифференцируема. Площадь под этой кривой равна 1,3 Найдите площадь под кривой циклоиды, определяемой уравнениями Используя уравнение 1.3, получаем КПП 1.7 Найдите площадь под кривой гипоциклоиды, определяемой уравнениями В дополнение к нахождению площади под параметрической кривой нам иногда необходимо найти длину дуги параметрической кривой. В случае линейного сегмента длина дуги равна расстоянию между конечными точками. Если частица перемещается из точки A в точку B по кривой, то расстояние, которое проходит частица, является длиной дуги. Чтобы разработать формулу для длины дуги, мы начнем с аппроксимации отрезками линии, как показано на следующем графике. Рисунок 1.23 Аппроксимация кривой отрезками прямых. Для плоской кривой, определяемой функциями x = x (t), y = y (t), a≤t≤b, x = x (t), y = y (t), a≤t≤b, мы начните с разделения интервала [a, b] [a, b] на n равных подинтервалов: t0 = a Тогда сложите их. Пусть s обозначает точную длину дуги, а snsn обозначает аппроксимацию n отрезков линии: Мы можем резюмировать этот метод в следующей теореме. Теорема 1.3 Рассмотрим плоскую кривую, заданную параметрическими уравнениями и предположим, что x (t) x (t) и y (t) y (t) — дифференцируемые функции от t. Тогда длина дуги этой кривой равна 1,5 На этом этапе боковой вывод приводит к предыдущей формуле для длины дуги. В частности, предположим, что параметр можно исключить, что приведет к функции y = F (x) .y = F (x). Тогда y (t) = F (x (t)) y (t) = F (x (t)) и цепное правило дает y ′ (t) = F ′ (x (t)) x ′ (t). y ′ (t) = F ′ (x (t)) x ′ (t). Подставляя это в уравнение 1.5, получаем Здесь мы предположили, что x ′ (t)> 0, x ′ (t)> 0, что является разумным предположением. Цепное правило дает dx = x ′ (t) dt, dx = x ′ (t) dt, и, полагая a = x (t1) a = x (t1) и b = x (t2) b = x (t2), мы получить формулу , которая представляет собой формулу для длины дуги, полученную во Введении в приложения интеграции. Найдите длину дуги полукруга, определяемую уравнениями Значения от t = 0t = 0 до t = πt = π очерчены красной кривой на рисунке 1.23. Чтобы определить его длину, используйте уравнение 1.5: Обратите внимание, что формула длины дуги полукруга равна πrπr, а радиус этой окружности равен 3.Это отличный пример использования исчисления для вывода известной формулы геометрической величины. КПП 1.8 Найдите длину дуги кривой, определяемой уравнениями Теперь мы вернемся к задаче, поставленной в начале раздела, о том, что бейсбольный мяч выходит из руки питчера. Игнорируя эффект сопротивления воздуха (если это не криволинейный шар!), Мяч движется по параболической траектории.Предполагая, что рука питчера находится в начале координат, а мяч движется слева направо в направлении положительной оси x , параметрические уравнения для этой кривой можно записать как , где t — время. Сначала мы вычисляем расстояние, которое проходит мяч, как функцию времени. Это расстояние представлено длиной дуги. Мы можем немного изменить формулу длины дуги. Сначала перепишите функции x (t) x (t) и y (t) y (t), используя v в качестве независимой переменной, чтобы избежать путаницы с параметром t : Затем запишем формулу длины дуги следующим образом: Переменная v действует как фиктивная переменная, которая исчезает после интегрирования, оставляя длину дуги как функцию времени t. Чтобы интегрировать это выражение, мы можем использовать формулу из Приложения A, Положим a = 140a = 140 и u = −32v + 2.u = −32v + 2. Это дает du = −32dv, du = −32dv, поэтому dv = −132du.dv = −132du. Следовательно, и Эта функция представляет расстояние, пройденное мячом, как функцию времени. Для расчета скорости возьмем производную этой функции по т. Хотя это может показаться сложной задачей, можно получить ответ непосредственно из Фундаментальной теоремы исчисления: Следовательно Через одну треть секунды после того, как мяч покидает руку питчера, расстояние, которое он проходит, равно Это значение составляет чуть более трех четвертей пути к исходной тарелке. Скорость мяча — Эта скорость соответствует примерно 95 милям в час — фастбол высшей лиги. Вспомните задачу о нахождении площади поверхности объема вращения. В разделах Длина кривой и Площадь поверхности мы вывели формулу для определения площади поверхности объема, созданного функцией y = f (x) y = f (x) от x = ax = a до x = b, x = b, вращается вокруг x — ось: Теперь рассмотрим объем вращения, создаваемый вращением параметрически определенной кривой x = x (t), y = y (t), a≤t≤bx = x (t), y = y (t), a≤t ≤b вокруг оси x , как показано на следующем рисунке. Рис. 1.25 Поверхность вращения, образованная параметрически заданной кривой. Аналогичная формула для параметрически определенной кривой: 1,6 при условии, что y (t) y (t) не отрицательно на [a, b]. [A, b]. Найдите площадь поверхности сферы радиусом r с центром в начале координат. Начнем с кривой, определяемой уравнениями Это создает верхний полукруг радиусом r с центром в начале координат, как показано на следующем графике. Рис. 1.26. Полукруг, созданный параметрическими уравнениями. Когда эта кривая вращается вокруг оси x , она образует сферу радиусом r . Чтобы вычислить площадь поверхности сферы, мы используем уравнение 1.6: Фактически, это формула площади поверхности сферы. КПП 1.9 Найдите площадь поверхности, образованную плоской кривой, определяемой уравнениями вращается вокруг оси x . В следующих упражнениях каждый набор параметрических уравнений представляет собой линию.Не удаляя параметр, найдите наклон каждой линии. x = 3 + t, y = 1 − tx = 3 + t, y = 1 − t x = 4−3t, y = −2 + 6tx = 4−3t, y = −2 + 6t x = −5t + 7, y = 3t − 1x = −5t + 7, y = 3t − 1 Для следующих упражнений определите наклон касательной, затем найдите уравнение касательной при заданном значении параметра. x = 3sint, y = 3cost, t = π4x = 3sint, y = 3cost, t = π4 x = стоимость, y = 8sint, t = π2x = стоимость, y = 8sint, t = π2 x = 2t, y = t3, t = −1x = 2t, y = t3, t = −1 x = t + 1t, y = t − 1t, t = 1x = t + 1t, y = t − 1t, t = 1 Для следующих упражнений найдите все точки кривой с заданным наклоном. x = 4cost, y = 4sint, x = 4cost, y = 4sint, slope = 0,5 x = 2cost, y = 8sint, slope = −1x = 2cost, y = 8sint, slope = −1 x = t + 1t, y = t − 1t, наклон = 1x = t + 1t, y = t − 1t, наклон = 1 x = 2 + t, y = 2−4t, наклон = 0x = 2 + t, y = 2−4t, наклон = 0 Для следующих упражнений запишите уравнение касательной в декартовых координатах для данного параметра t . x = et, y = 1 − lnt2, t = 1x = et, y = 1 − lnt2, t = 1 x = tlnt, y = sin2t, t = π4x = tlnt, y = sin2t, t = π4 x = et, y = (t − 1) 2, при (1,1) x = et, y = (t − 1) 2, при (1,1) Для x = sin (2t), y = 2sintx = sin (2t), y = 2sint, где 0≤t <2π.0≤t <2π. Найдите все значения t , при которых существует горизонтальная касательная. Для x = sin (2t), y = 2sintx = sin (2t), y = 2sint, где 0≤t <2π.0≤t <2π. Найдите все значения t , при которых существует вертикальная касательная. Найдите все точки на кривой x = 4sin (t), y = 4cos (t) x = 4sin (t), y = 4cos (t), которые имеют наклон 0,50,5 Найдите dydxdydx для x = sin (t), y = cos (t). X = sin (t), y = cos (t). Найдите уравнение касательной к x = sin (t), y = cos (t) x = sin (t), y = cos (t) при t = π4.t = π4. Для кривой x = 4t, y = 3t − 2, x = 4t, y = 3t − 2 найдите наклон и вогнутость кривой при t = 3.t = 3. Для параметрической кривой, уравнение которой имеет вид x = 4cosθ, y = 4sinθ, x = 4cosθ, y = 4sinθ, найдите наклон и вогнутость кривой при θ = π4.θ = π4. Найдите наклон и вогнутость кривой, уравнение которой: x = 2 + secθ, y = 1 + 2tanθx = 2 + secθ, y = 1 + 2tanθ при θ = π6.θ = π6. Найдите все точки на кривой x = t + 4, y = t3−3tx = t + 4, y = t3−3t, в которых есть вертикальные и горизонтальные касательные. Найдите все точки на кривой x = secθ, y = tanθx = secθ, y = tanθ, в которых существуют горизонтальные и вертикальные касательные. Для следующих упражнений найдите d2y / dx2.d2y / dx2. x = t4−1, y = t − t2x = t4−1, y = t − t2 x = sin (πt), y = cos (πt) x = sin (πt), y = cos (πt) x = e − t, y = te2tx = e − t, y = te2t Для следующих упражнений найдите точки на кривой, в которых касательная линия является горизонтальной или вертикальной. x = t (t2−3), y = 3 (t2−3) x = t (t2−3), y = 3 (t2−3) х = 3t1 + t3, y = 3t21 + t3x = 3t1 + t3, y = 3t21 + t3 Для следующих упражнений найдите dy / dxdy / dx в значении параметра. x = стоимость, y = синт, t = 3π4x = стоимость, y = синт, t = 3π4 x = t, y = 2t + 4, t = 9x = t, y = 2t + 4, t = 9 x = 4cos (2πs), y = 3sin (2πs), s = −14x = 4cos (2πs), y = 3sin (2πs), s = −14 Для следующих упражнений найдите d2y / dx2d2y / dx2 в заданной точке, не удаляя параметр. x = 12t2, y = 13t3, t = 2x = 12t2, y = 13t3, t = 2 x = t, y = 2t + 4, t = 1x = t, y = 2t + 4, t = 1 Найдите t интервалов, на которых кривая x = 3t2, y = t3 − tx = 3t2, y = t3 − t вогнута вверх и вниз. Определите вогнутость кривой x = 2t + lnt, y = 2t − lnt.x = 2t + lnt, y = 2t − lnt. Нарисуйте и найдите площадь под одной аркой циклоиды x = r (θ − sinθ), y = r (1 − cosθ) .x = r (θ − sinθ), y = r (1 − cosθ). Найдите площадь, ограниченную кривой x = cost, y = et, 0≤t≤π2x = cost, y = et, 0≤t≤π2 и линиями y = 1y = 1 и x = 0.x = 0. Найдите площадь, заключенную в эллипс x = acosθ, y = bsinθ, 0≤θ <2π.x = acosθ, y = bsinθ, 0≤θ <2π. Найдите площадь области, ограниченной x = 2sin2θ, y = 2sin2θtanθ, x = 2sin2θ, y = 2sin2θtanθ, для 0≤θ≤π2.0≤θ≤π2. Для следующих упражнений найдите площадь областей, ограниченных параметрическими кривыми и указанными значениями параметра. x = 2cotθ, y = 2sin2θ, 0≤θ≤πx = 2cotθ, y = 2sin2θ, 0≤θ≤π [T] x = 2acost − acos (2t), y = 2asint − asin (2t), 0≤t <2πx = 2acost − acos (2t), y = 2asint − asin (2t), 0≤t < 2π [T] x = asin (2t), y = bsin (t), 0≤t <2πx = asin (2t), y = bsin (t), 0≤t <2π («песочные часы») [T] x = 2acost − asin (2t), y = bsint, 0≤t <2πx = 2acost − asin (2t), y = bsint, 0≤t <2π («слеза») Для следующих упражнений найдите длину дуги кривой на указанном интервале параметра. x = 4t + 3, y = 3t − 2,0≤t≤2x = 4t + 3, y = 3t − 2,0≤t≤2 x = 13t3, y = 12t2,0≤t≤1x = 13t3, y = 12t2,0≤t≤1 x = cos (2t), y = sin (2t), 0≤t≤π2x = cos (2t), y = sin (2t), 0≤t≤π2 х = 1 + t2, y = (1 + t) 3,0≤t≤1x = 1 + t2, y = (1 + t) 3,0≤t≤1 x = etcost, y = etsint, 0≤t≤π2x = etcost, y = etsint, 0≤t≤π2 (выразите ответ в виде десятичной дроби с округлением до трех знаков) x = acos3θ, y = asin3θx = acos3θ, y = asin3θ на интервале [0,2π) [0,2π) (гипоциклоида) Найдите длину одной дуги циклоиды x = 4 (t − sint), y = 4 (1 − cost). X = 4 (t − sint), y = 4 (1 − cost). Найдите расстояние, пройденное частицей с положением (x, y) (x, y), поскольку t изменяется в заданном временном интервале: x = sin2t, y = cos2t, 0≤t≤3π.x = sin2t, y = cos2t, 0≤t≤3π. Найдите длину одной дуги циклоиды x = θ − sinθ, y = 1 − cosθ.x = θ − sinθ, y = 1 − cosθ. Покажите, что общая длина эллипса x = 4sinθ, y = 3cosθx = 4sinθ, y = 3cosθ равна L = 16∫0π / 21 − e2sin2θdθ, L = 16∫0π / 21 − e2sin2θdθ, где e = cae = ca и с = a2 − b2.с = a2 − b2. Найдите длину кривой x = et − t, y = 4et / 2, −8≤t≤3.x = et − t, y = 4et / 2, −8≤t≤3. Для следующих упражнений найдите площадь поверхности, полученную вращением данной кривой вокруг оси x . x = t3, y = t2,0≤t≤1x = t3, y = t2,0≤t≤1 x = acos3θ, y = asin3θ, 0≤θ≤π2x = acos3θ, y = asin3θ, 0≤θ≤π2 [T] Используйте CAS, чтобы найти площадь поверхности, созданную вращением x = t + t3, y = t − 1t2,1≤t≤2x = t + t3, y = t − 1t2,1≤t ≤2 относительно оси x .(Ответ с точностью до трех знаков после запятой.) Найдите площадь поверхности, полученную вращением x = 3t2, y = 2t3,0≤t≤5x = 3t2, y = 2t3,0≤t≤5 вокруг оси y . Площадь под параметрической кривой
Пример 1.7
Определение площади под параметрической кривой
Решение
Длина дуги параметрической кривой
Длина дуги параметрической кривой
Пример 1.8
Определение длины дуги параметрической кривой
Решение
Площадь поверхности, созданная параметрической кривой
Пример 1.9
Поиск площади поверхности
Решение
Раздел 1.2. Упражнения